

특허(전기전자)

공기청정기능을 갖는 하이브리드 냉각탑이 내장된 가습 가능 히트펌프
₩ 5,000,000
₩ 7,500,000
본 발명은 상기와 같은 문제점을 해결하기 위해 안출된 것으로, 히트펌프 내에 열교환기 및 냉각탑을 설치하여, 고온ㆍ고압의 냉매가스를 열교환시키는 열교환매체를 기화시켜 발생되는 증기와 응축기에서 발생되는 고온의 열을 목적 장소로 배출시킴으로써, 난방과 가습을 동시에 수행할 수 있으며, 공기청정기능을 갖는 하이브리드 냉각탑이 내장된 가습가능 히트펌프를 제공하는자 하는 것으로서, 냉매가스를 압축하여 배출하는 압축기(100), 압축기(100)에서 압축된 냉매가스를 액상으로 응축하는 응축기(200), 응축기(200)에서 응축된 액상냉매를 팽창시키는 팽창밸브(300), 팽창밸브(300)에서 팽창된 액상냉매를 증발시키면서 냉매가스를 압축기로 복귀시키는 증발기(400), 압축기(100)와 응축기(200)를 연결하는 관로상에 설치되어 압축기(100)에서 토출되는 고온 고압의 냉매가스를 열교환시키는 열교환기(500), 열교환기(500)와 연결되어 냉매가스와 열교환이 이루어진 고온의 열교환 매체로 증기를 발생시키는 냉각탑(600)을 포함하되; 응축기측 관로(L2) 상에 설치되는 온도센서(210)에 의해 온도를 측정하여 측정된 온도값에 따라 밸브(V)를 조절하여 냉매가스의 유량을 조절하는 것을 요지로 한다.
고속도로 교통위반 단속을 위한 무인 비행체 경로 제어 방법
₩ 5,000,000
₩ 7,500,000
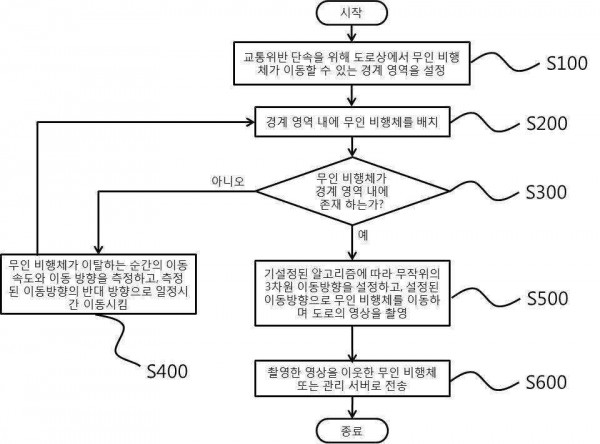
본 발명은 도로상에서 신뢰도 높은 촬영을 위한 고속도로 교통위반 단속을 위한 무인 비행체 경로 제어 방법에 관한 것으로, 복수 개의 무인 비행체와 이동식 단말기가 에드혹 네트워크(Ad-Hoc Network)로 연결되는 고속도로 교통위반 단속을 위한 무인 비행체 경로 제어 방법에 있어서, 교통위반 단속을 위한 도로상에서 무인 비행체가 이동할 수 있는 경계 영역이 설정되는 경계 설정 단계와, 상기 경계 설정 단계에서 설정된 상기 경계 영역 내에 상기 무인 비행체가 배치되는 배치 단계와, 상기 무인 비행체가 상기 경계 영역 내에 존재하는지 여부를 판단하는 존재 확인 여부 단계와, 상기 무인 비행체가 상기 경계 영역에서 벗어나는 경우, 상기 무인 비행체가 이탈하는 순간의 이동속도와 이동방향을 측정하고, 측정된 이동방향의 반대방향으로 일정시간 이동시켜 상기 경계 영역으로 이동시키는 이탈 방지 단계와, 상기 무인 비행체가 상기 경계 영역 내에 존재하는 경우, 기설정된 알고리즘에 따라 무작위의 3차원 이동방향을 설정하고, 설정된 이동방향으로 일정시간 이동하며 도로상에 법규위반 차량의 영상을 촬영하는 영상 촬영 단계 및 상기 영상 촬영 단계에서 촬영한 영상을 이웃한 무인 비행체 또는 이동식 단말기로 전송하는 영상 전송 단계를 포함하는 것을 특징으로 한다.
에드혹 네트워크에서 데이터 전달을 위한 라우팅 경로 설정 시스템을 적용한 무인 비행체
₩ 5,000,000
₩ 7,500,000
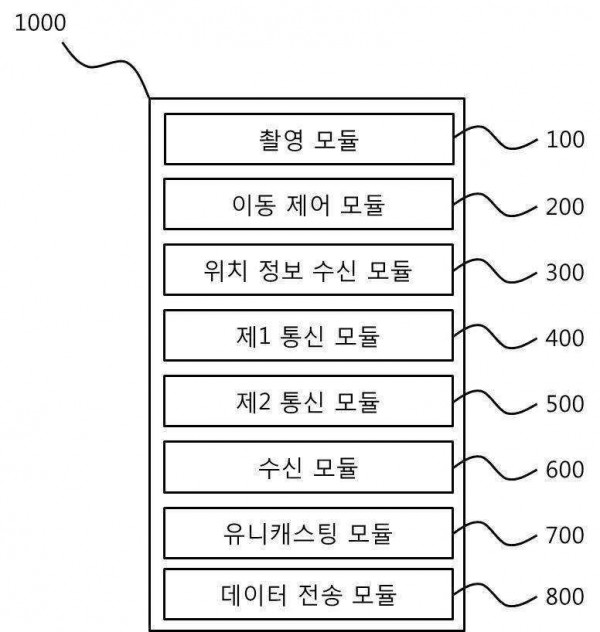
본 발명은 복수 개의 무인 비행체 간에 효율적인 데이터 통신을 위한 에드혹 네트워크에서 데이터 전달을 위한 라우팅 경로 설정 시스템을 적용한 무인 비행체에 관한 것으로, 도로상에서 차량의 촬영 영상을 생성하는 촬영 모듈과, 기설정된 알고리즘에 따라 무작위의 3차원 이동방향을 따라 이동시키는 이동 제어 모듈과, 각각의 노드의 위치 정보를 수신하는 위치 정보 수신 모듈과, 상기 위치 정보 수신 모듈로부터 수신한 위치 정보를 바탕으로 소스 노드로부터 목적지 노드로 데이터 전달 경로의 탐색을 위한 경로 요청 패킷을 통신하는 제1 통신 모듈과, 상기 소스 노드로부터 송신된 경로 요청 패킷을 릴레이 노드가 수신함에 따라 상기 경로 요청 패킷을 재통신하는 제2 통신 모듈과, 상기 경로 요청 패킷을 목적지 노드가 수신함에 따라 기설정된 시간동안 다른 복수 개의 경로 요청 패킷을 수신하는 수신 모듈과, 상기 목적지 노드가 상기 복수 개의 경로 요청 패킷에 기초하여 최적의 경로를 결정하여 소스방향 이전 노드에게 경로 응답 패킷을 유니캐스팅하는 유니캐스팅 모듈 및 상기 경로 응답 패킷이 상기 소스 노드에 전달됨에 따라 상기 소스 노드로부터 데이터 전송이 시작되는 데이터 전송 모듈을 포함하는 것을 특징으로 한다.

저장조 ARCH 분쇄 유압 햄머
₩ 5,000,000
₩ 7,500,000
본 발명은 복수의 구멍을 형성하고 분말 형태의 재료를 저장하는 하나 이상의 분말재료 저장조, 상기 분말재료 저장조에 설치되어 상기 분말재료 저장조 내에 흐르는 분말재료의 저장조 내벽에서의 가교형 고착으로 인한 막힘 여부를 감지하는 초음파센서, 상기 구멍을 통해 상기 분말재료 저장조의 외면에 설치되고, 햄머를 포함하며 동작 및 충격소음이 없는 분쇄유압장치 및 상기 햄머에 의해 상기 고착된 분말재료를 분쇄하는 고속 유압 진동장치 및 옥외에 설치되어 상기 고속 유압 진동장치의 유압을 제어하는 제어판넬을 포함하는 것을 특징으로 하는 저장조 ARCH 분쇄 유압 햄머에 관한 것이다.

해상 인명구조용 보트드론
₩ 5,000,000
₩ 7,500,000
해상 인명구조용 보트드론은, 선체; 주변 영상을 획득하고, 상기 선체 주변에 위치하는 객체들의 위치를 측정하여 센싱 신호를 출력하는 센싱 장치; 상기 주변 영상에 대한 분석을 통해 상기 객체들 중에서 익수자를 감지하고, 상기 익수자에 대응하는 제1 객체 영상의 위치 변화에 기초하여 상기 익수자의 위치를 추정하며, 상기 익수자의 위치에 기초하여 이동 경로를 설정하되, 상기 센싱 신호에 기초하여 상기 익수자의 위치를 갱신하는 제어 장치를 포함한다. 여기서, 상기 센싱 장치는, 상기 선체로부터 상기 익수자까지의 이격 거리가 제1 기준 거리보다 작은 경우, 상기 센싱 신호를 출력한다.

항만물류정보시스템의 정보보안 취약점 진단시스템
₩ 5,000,000
₩ 7,500,000
상기의 목적을 이루기 위한 본 발명의 항만물류정보시스템의 정보보안 취약점 진단시스템은 서버를 두고 내부망(10)과 외부망(20)이 분리된 통신환경에서 항만컨테이너터미널에서 사용되는 물리적 운영장비와 컨테이너터미널 운영시스템과 연계된 항만물류정보시스템의 취약점 진단시스템으로서, 내부망(10) 또는 항만물류정보시스템 운영네트워크로 구성되어 진단시스템을 운영하는 내부장치부(100); 상기 서버의 내부망(10)에 설치되어 미리 설정된 계획에 따라 주기적으로 상기 항만물류정보시스템의 DBMS 및 상기 항만물류정보시스템의 취약점을 진단하는 에이전트부(300); 상기 내부망(10)과 상기 외부망(20)을 암호화된 단독 통신을 지원하여 연결하는 통신부(400); 및 상기 에이전트부(300)에서 진단한 진단 결과를 분석하는 결과분석부(500)를 포함하고, 상기 내부장치부(100)는 상기 에이전트부(300)에서 진단한 진단 결과를 취합하는 취합부(110); 및 진단 증적 보존을 위해 상기 외부망(20)을 통해 접근하는 비인가 접속 시도를 차단하는 망분리 장치(120)를 포함하여, 내부망 내에서 진단결과를 취합하고 분석할 수 있도록 하는 것을 특징으로 한다.
예측오차 확장과 히스토그램 쉬프팅 기반의 가역성 DNA 정보은닉 방법
₩ 5,000,000
₩ 7,500,000
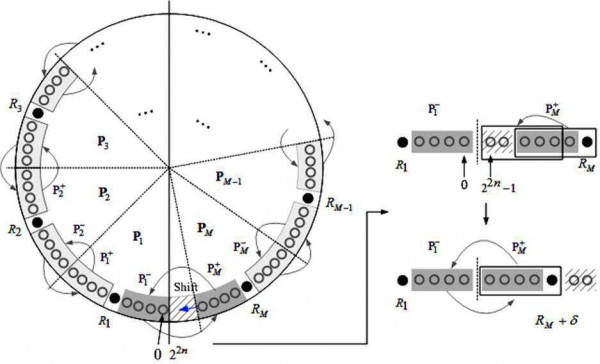
본 발명은 예측오차 확장과 히스토그램 쉬프팅 기반으로 생물학적 변이없이 허위 시작코돈 방지, 원본 서열 길이 유지, 높은 워터마크 용량성, 블라인드 검출이 가능한 예측오차 확장과 히스토그램 쉬프팅 기반의 가역성 DNA 정보은닉 방법에 관한 것이다.
미세 조류 공급장치를 이용한 스마트 양식장 관리 시스템
₩ 5,000,000
₩ 7,500,000
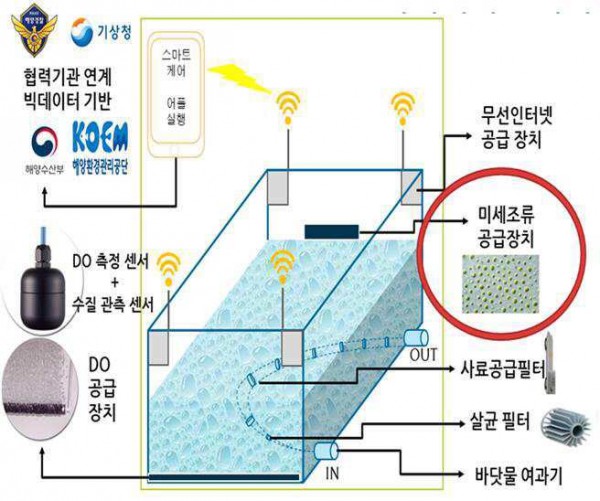
본 발명은 수질측정 센서, 온도측정 센서, 산소 공급장치, 사료 공급장치, 살균 필터, 무선통신장치를 포함한 양식장, 양식장과 통신하는 서버, 서버에 접속하여 양식장 환경을 모니터링 하고, 원격제어 하는 스마트폰을 포함하는 스마트 양식장 시스템에 있어서, 동물성 플랑크톤을 배양, 생산, 공급하는 미세 조류 공급장치를 더 포함하여 식물성 플랑크톤에 의한 녹조, 적조 현상을 완화하는 것을 특징으로 하는 미세 조류 공급장치를 이용한 스마트 양식장 관리 시스템에 관한 것이다.
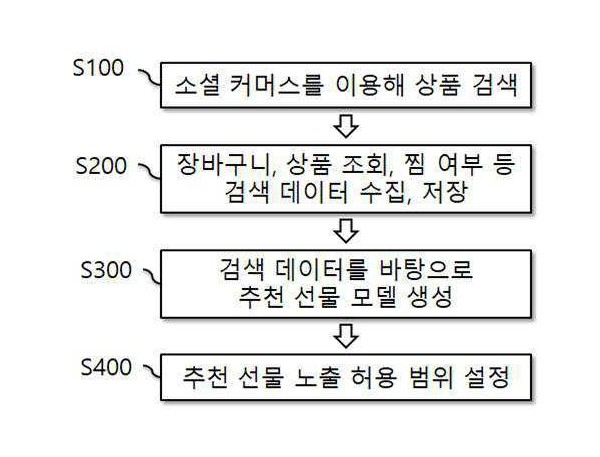
소셜 커머스와 소셜 네트워크를 통한 선물 추천 방법
₩ 5,000,000
₩ 7,500,000
본 발명은 소셜 커머스와 소셜 네트워크를 통한 선물 추천 방법으로, 소셜 커머스와 소셜 네트워크를 빅데이터를 통해 분석 하고, 위시리스트 분석 결과를 지인들에게 노출 범위를 정해 노출시킴으로써 지인들이 선물을 준비할 때 추천 정보를 제공하여 선물 고민으로 인한 스트레스를 줄이고, 원하는 선물을 주고 받게하는 소셜 커머스와 소셜 네트워크를 통한 선물 추천 방법에 관한 것이다.
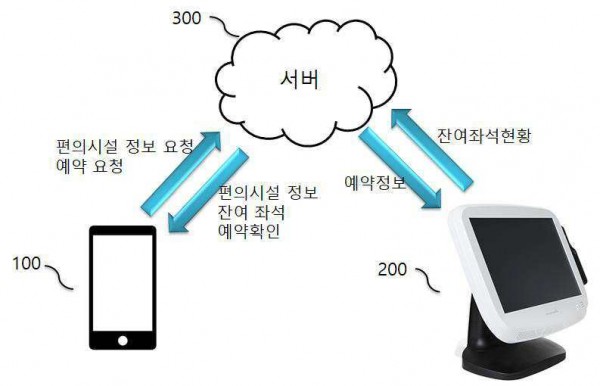
실시간 좌석 확인 시스템
₩ 5,000,000
₩ 7,500,000
본 발명은 실시간 좌석 확인 시스템에 관한 것으로,식당, PC방, 노래방 중 어느 하나 이상을 포함하는 편의시설에 설치되고, 결제, 좌석 선택, 잔여 좌석 확인등을 할 수 있는 프로그램이 설치된 포스기, 포스기에서 수집된 잔여 좌석 정보를 수집하는 프로그램 서버, 프로그램 서버에 접속하여 포스기의 잔여 좌석 정보를 확인할 수 있는 애플리케이션이 설치된 스마트 폰을 포함하는 것을 특징으로 하는 실시간 좌석 확인 시스템에 관한 것이다.
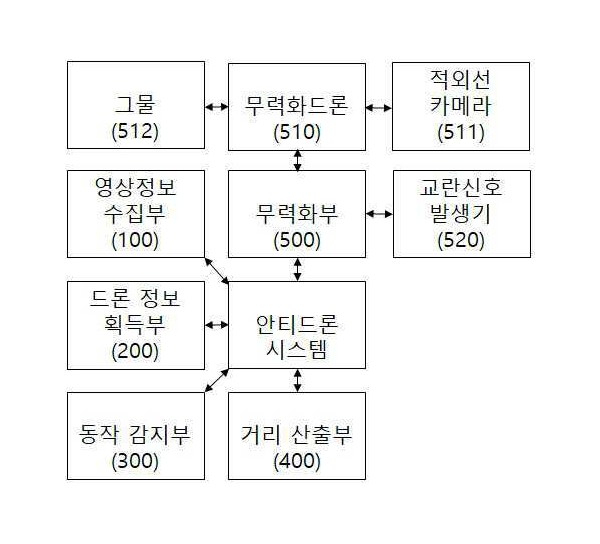
악용된 드론을 무력화하는 안티드론 시스템 및 운용방법
₩ 5,000,000
₩ 7,500,000
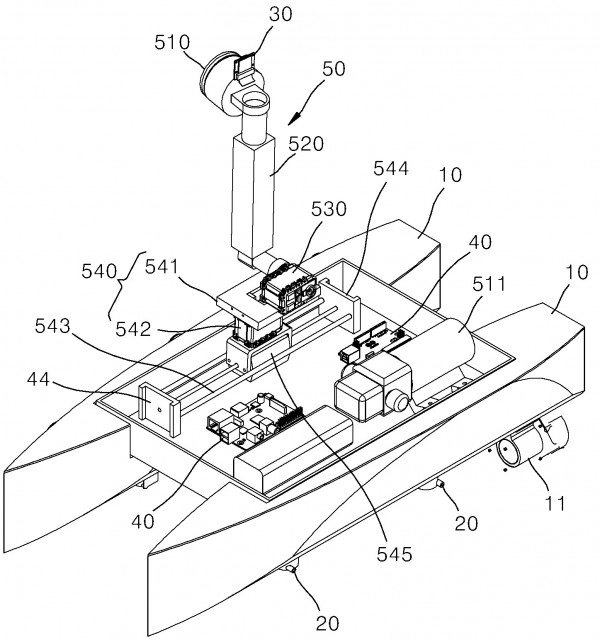
상기의 목적을 이루기 위한 본 발명의 악용된 드론을 무력화하는 안티드론 시스템 및 운용방법은, 무력화드론(510)을 이용하여 악용된 드론(10)을 무력화하는 안티드론 시스템으로서, 미리 설정된 영역에 대한 영상정보가 수집되도록 하는 영상정보 수집부(100); 상기 영상정보 수집부(100)에서 수집한 상기 영상정보를 분석하여 상기 드론(10)에 대한 정보를 획득하는 드론 정보 획득부(200); 상기 미리 설정된 영역 내에 드론(10)의 동작이 감지되도록 하는 동작 감지부(300); 상기 드론(10)까지의 거리를 실시간으로 산출하는 거리 산출부(400); 및 상기 드론(10)을 무력화 시키는 무력화부(500)를 포함하는 것을 특징으로 하고, 상기 무력화부(500)는, 상기 드론(10)을 향하여 직접 비행하여 접근할 수 있는 무력화드론(510); 및 상기 드론(10)을 교란시키기 위한 신호를 발생시키는 교란신호 발생기(520)를 포함하는 것을 특징으로 하고, 상기 무력화드론(510)은, 상기 영상정보 수집부(100)로 촬영한 영상을 전송하는 적외선 카메라(511); 상기 드론(10)을 향해 발포하여 포획하는 그물(512)을 포함하는 것을 특징으로 하고, 상기 드론 정보 획득부(200)가 획득하는 상기 정보는, 상기 드론(10)의 위도, 경도, 고도 및 속도를 포함하는 것을 특징으로 하고, 미리 설정된 경로 및 미리 선정된 구역을 비행하며 감시 및 감지할 수 있도록 적외선 카메라(511), 포획 그물(512), 교란신호 발생기가 구비된 무력화드론을 이용하여 악용된 드론을 무력화하는 안티드론 운용방법으로서, 상기 무력화드론(510)이 미리 설정된 경로를 따라 미리 선정된 구역을 비행하며 상기 적외선 카메라(511)를 이용하여 촬영한 영상을 안티드론 시스템으로 전송하는 단계(S100); 상기 안티드론 시스템에서 상기 촬영된 영상을 분석하여 악용된 드론(10)이 있는지 탐색하는 단계(S200); 상기 탐색하는 단계(S200)에서 악용된 드론(10)이 탐색되면, 상기 무력화드론(510)이 상기 드론(10)으로 접근하는 단계(S300); 상기 무력화드론(510)이 교란신호 발생 및 포획 그물(512) 발포로 상기 드론(10)을 무력화시키는 단계(S400); 상기 안티드론 시스템이 상기 드론(10)이 무력화 되었는지 확인하는 단계(S500); 상기 드론(10)이 무력화 되었을 경우, 추락하는 지점을 계산하는 단계(S600); 및 상기 계산하는 단계(S600)에서 계산된 지점을 상기 안티드론 시스템의 관리자에게 알리는 단계(S700)를 포함하는 것을 특징으로 한다.
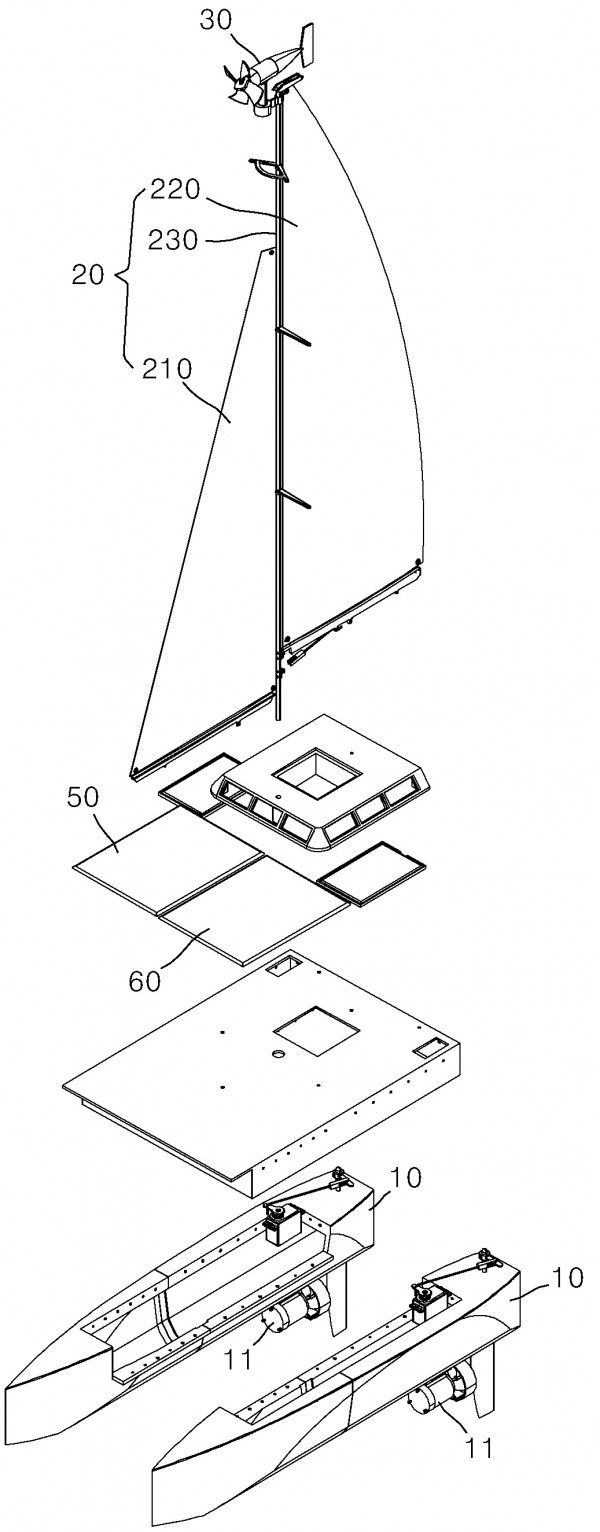
자동 세일링 로봇선
₩ 5,000,000
₩ 7,500,000
본 발명은 자율운행가능한 자동 세일링 로봇선에 있어서, 소정의 적재공간을 제공하고, 전기모터(11) 또는 내연기관(11) 엔진을 구동원으로 하여 수상운행가능한 쌍동선(10)과; 상기 쌍동선(10)의 운행방향을 제어하는 메인(main) 돛(210)과, 지브(jib) 돛(220) 그리고 마스트(mast)(230)로 구성되는 방향 제어부(20)와; 상기 마스트의 일측에 구비되고, 풍향과 풍속을 측정하는 풍향풍속 측정부(30)와; 상기 풍향풍속 측정부(30)로부터 전송된 정보를 분석하여, 상기 메인 돛과 지브 돛의 방향을 결정하는 제어부와; 선박의 위치와 진행방향을 측정할 수 있는 3축 지자기 센서와, GPS센서를 포함하여 구성되는 위치측정센서부와; 선박의 운행에 필요한 전기동력을 제공하기 위해서 구비되고, 빛에너지를 전기에너지로 변환시키는 집광판과 직류전원으로 저장하는 배터리부, 그리고 필요한 동력원에 따라서 직류전원을 교류전원으로 변환시키는 컨버터, 혹은 교류전원을 직류전원으로 변환시키는 인터버와 그리고 이를 제어하는 동력제어부를 포함하여 구성되는 태양광충전시스템부(60)와; 상기 제어부로부터 전송되는 신호에 따라, 상기 방향 제어부(20)의 위치 및 구동을 제어하는 조타부(70);를 포함하여 구성되고, 소정의 세기의 바람이 부는 곳에서는 상기 풍향풍속 측정부(30)에 측정하는 풍향과 풍속을 이용하여 소정의 입력된 위치를 향해 주행을 하고, 바람이 없는 곳이나 정박하는 경우에는 상기 전기모터(11) 또는 내연기관(11)에서 공급되는 추력을 이용하여 운행하는 것을 특징으로 하는 자동 세일링 로봇선의 구성을 제공한다. 본 발명의 실시 예에 따른 자동 세일링 로봇선에 의할 때, 해상에서 발생한 풍력을 이용하여 풍력의 세기 또는 방향 등에 구애받지 않고 풍력과 태양광을 이용한 충전시스템에서 공급되는 청정에너지를 이용하여 자율세일링이 가능한 로봇선의 구성 및 시스템을 제공하는 데 그 이점이 있다.
스마트 화재진압 로봇선
₩ 5,000,000
₩ 7,500,000
본 발명은 화재가 발생한 선박 또는 구조물에 대해서 방재작업을 수행하는 선박방재용 수상용 로봇에 있어서, 상기 소정의 적재공간을 제공하는 선체를 구비한 쌍동선(10)의 선미와 선수로부터 각각 소정의 이격거리에 위치하고, 선체의 바깥방향으로 추력을 제공하여 선박의 위치를 제어하는 워터젯(20)과; 상기 쌍동선(10)의 일측에 구비되어, 화재가 발생한 선박 또는 구조물의 화원의 위치를 측정하는 열화상 카메라부(30)와; 상기 열화상 카메라부(30)에서 전송되는 화염에 대한 크기와 형상에 대해서 파악하고, 소정의 크기로 화염영역을 분할하여 화원을 도출해내는 기능을 구비한 제어부(40)와; 상기 쌍동선(10)에 형성된 안착공간에 구비되고, 상기 제어부(40)에서 전송되는 신호에 따라 화원을 추적하여 화염을 제거하는 방재노즐이 구비된 로봇암부(50);를 포함하여 구성되고, 상기 선체의 일측에는 거리를 측정하는 초음파 센서(60)가 일개소 이상에 구비되어, 상기 워터젯(20)에 발생하는 추진력을 제어하여 화재가 발생한 지점과 소정의 거리를 유지하면서 화원을 추적하여 화원을 방재하는 스마트 화재진압 로봇선의 구성을 제공한다. 본 발명의 실시 예에 따른 스마트 화재진압 로봇선에 의할 때, 선박 또는 수상구조물 등에 화재발생시에 날씨나 기상환경 등의 영향을 받지 않고 실시간으로 효율적인 무인방재작업이 가능하게 하는 이점이 있다.
IoT 기반의 담배연기 제연 방법
₩ 5,000,000
₩ 7,500,000
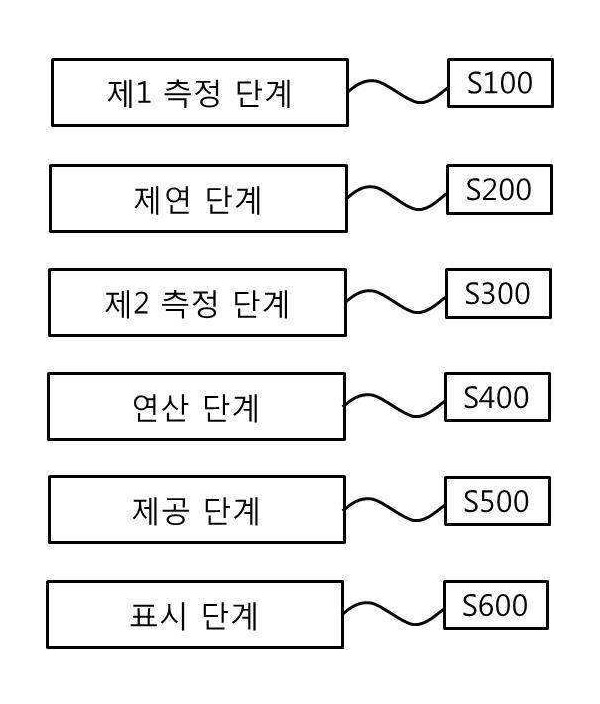
본 발명은 IoT(Internet of Things) 기반의 담배연기 제연 방법은 담배연기 제연기의 흡입구로 흡입되는 담배연기 및 공기의 일산화탄소, 오존 및 암모니아의 농도를 측정하는 제1 측정 단계와, 상기 흡입구로 흡입되는 담배연기 및 공기를 플라즈마 반응부를 통해 제연시키는 제연 단계와, 상기 제연 단계에서 제연되어 상기 담배연기 제연기의 배출구로 배출되는 공기의 일산화탄소, 오존 및 암모니아의 농도를 측정하는 제2 측정 단계와, 상기 제1 측정 단계와 제2 측정 단계에서 측정된 공기의 농도를 기설정된 연산식을 통해 농도 변화량을 연산하는 연산 단계와, 상기 연산 단계에서 연산된 농도 변화량을 디지털 신호로 변환하고, 변환된 디지털 신호를 근거리 또는 원거리에 제공하는 제공 단계 및 상기 제공 단계에서 제공된 디지털 신호를 수신하고, 수신된 디지털 신호를 그래프 또는 수치로 표시하는 표시 단계를 포함하는 것을 특징으로 한다.
차량 엔진룸의 소음 저감방법 및 시스템
₩ 5,000,000
₩ 7,500,000
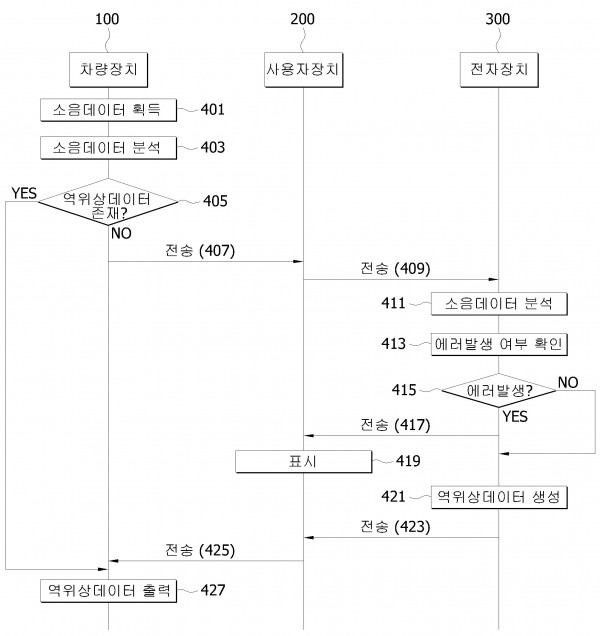
본 발명은 차량 엔진룸의 소음 저감방법 및 시스템에 관한 것으로, 차량장치가 차량 주행 중에 발생되는 소음데이터를 획득하는 단계, 차량장치가 소음데이터를 분석하고, 소음데이터의 위상에 대한 역위상 데이터의 존재여부를 확인하는 단계 및 차량장치가 존재여부의 확인 결과에 따라 역위상 데이터에 대응되는 소리를 스피커를 통해 출력하거나, 소음데이터를 사용자 장치를 통해 전자장치로 전송하는 단계를 포함할 수 있고, 다른 실시 예로도 적용이 가능하다.
























