

특허(전기전자)
상품 정보
상품 기본설명
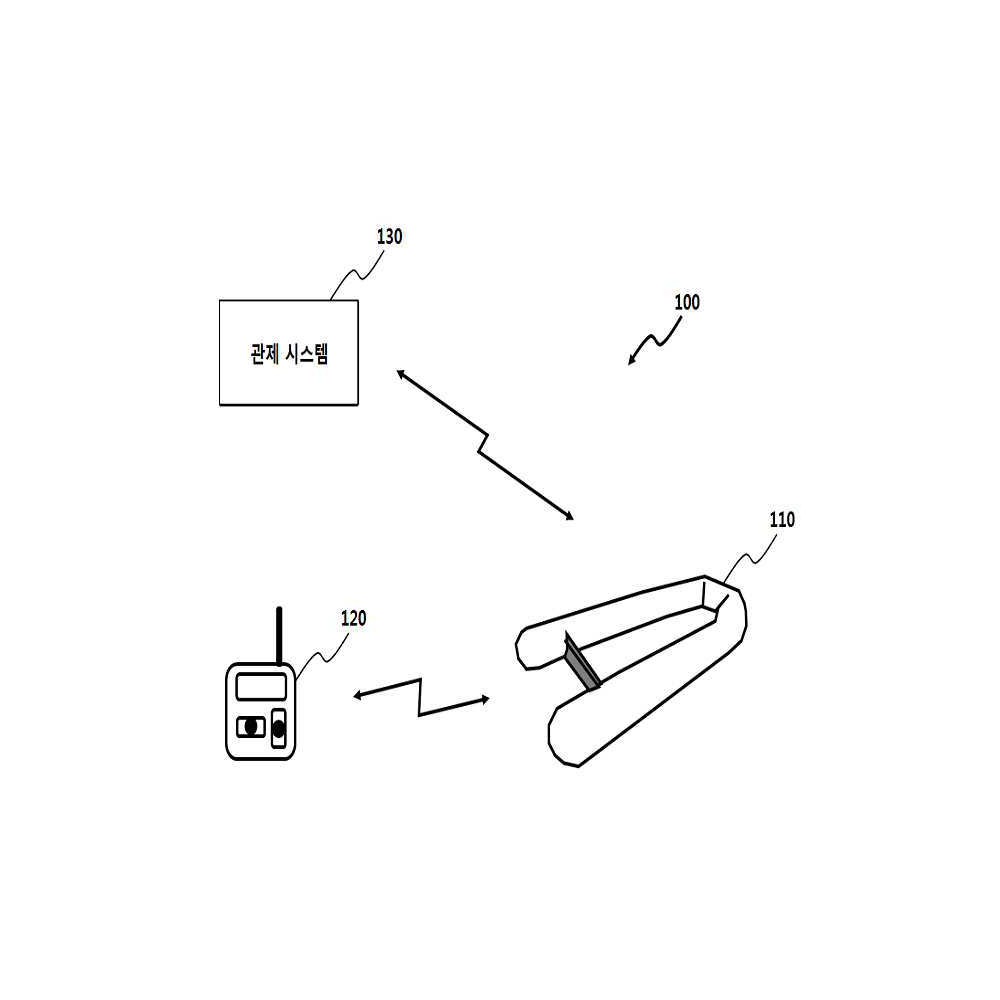
해상 인명구조용 보트드론은, 선체; 주변 영상을 획득하고, 상기 선체 주변에 위치하는 객체들의 위치를 측정하여 센싱 신호를 출력하는 센싱 장치; 상기 주변 영상에 대한 분석을 통해 상기 객체들 중에서 익수자를 감지하고, 상기 익수자에 대응하는 제1 객체 영상의 위치 변화에 기초하여 상기 익수자의 위치를 추정하며, 상기 익수자의 위치에 기초하여 이동 경로를 설정하되, 상기 센싱 신호에 기초하여 상기 익수자의 위치를 갱신하는 제어 장치를 포함한다. 여기서, 상기 센싱 장치는, 상기 선체로부터 상기 익수자까지의 이격 거리가 제1 기준 거리보다 작은 경우, 상기 센싱 신호를 출력한다.
상품 상세설명

상품문의
교환/반품






