

특허(전기전자)
상품 정보
상품 기본설명
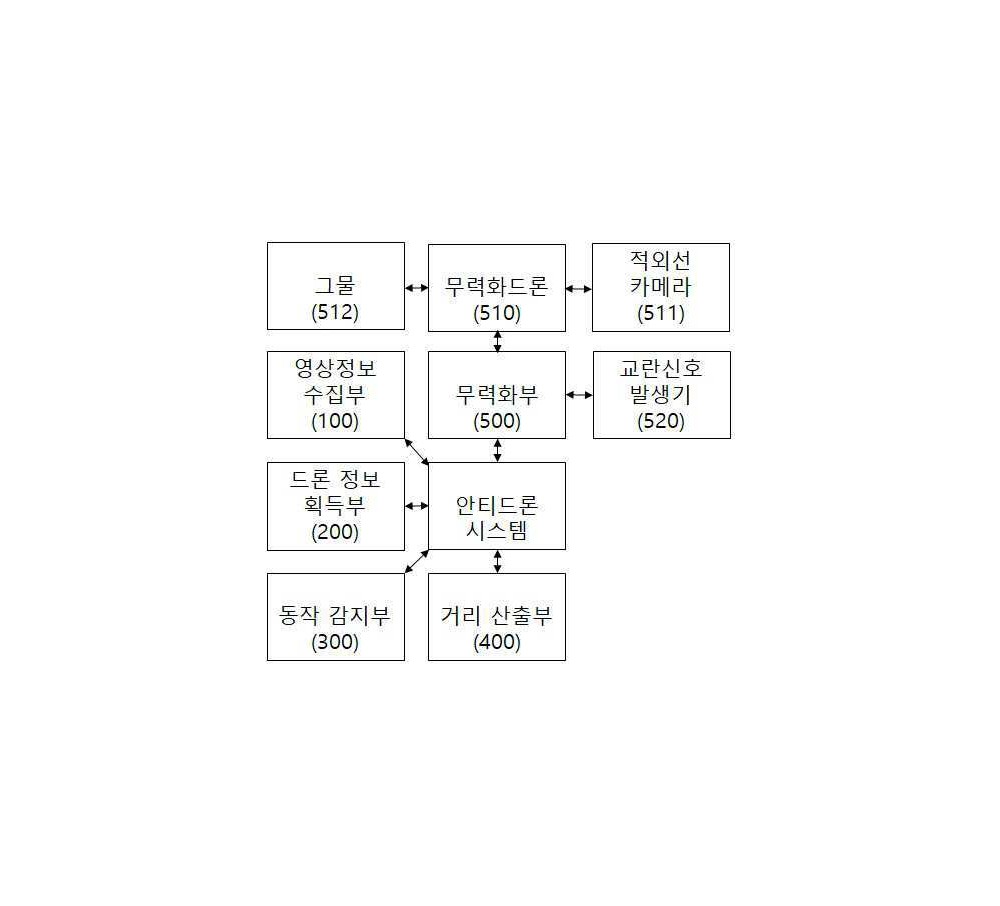
상기의 목적을 이루기 위한 본 발명의 악용된 드론을 무력화하는 안티드론 시스템 및 운용방법은, 무력화드론(510)을 이용하여 악용된 드론(10)을 무력화하는 안티드론 시스템으로서, 미리 설정된 영역에 대한 영상정보가 수집되도록 하는 영상정보 수집부(100); 상기 영상정보 수집부(100)에서 수집한 상기 영상정보를 분석하여 상기 드론(10)에 대한 정보를 획득하는 드론 정보 획득부(200); 상기 미리 설정된 영역 내에 드론(10)의 동작이 감지되도록 하는 동작 감지부(300); 상기 드론(10)까지의 거리를 실시간으로 산출하는 거리 산출부(400); 및 상기 드론(10)을 무력화 시키는 무력화부(500)를 포함하는 것을 특징으로 하고, 상기 무력화부(500)는, 상기 드론(10)을 향하여 직접 비행하여 접근할 수 있는 무력화드론(510); 및 상기 드론(10)을 교란시키기 위한 신호를 발생시키는 교란신호 발생기(520)를 포함하는 것을 특징으로 하고, 상기 무력화드론(510)은, 상기 영상정보 수집부(100)로 촬영한 영상을 전송하는 적외선 카메라(511); 상기 드론(10)을 향해 발포하여 포획하는 그물(512)을 포함하는 것을 특징으로 하고, 상기 드론 정보 획득부(200)가 획득하는 상기 정보는, 상기 드론(10)의 위도, 경도, 고도 및 속도를 포함하는 것을 특징으로 하고, 미리 설정된 경로 및 미리 선정된 구역을 비행하며 감시 및 감지할 수 있도록 적외선 카메라(511), 포획 그물(512), 교란신호 발생기가 구비된 무력화드론을 이용하여 악용된 드론을 무력화하는 안티드론 운용방법으로서, 상기 무력화드론(510)이 미리 설정된 경로를 따라 미리 선정된 구역을 비행하며 상기 적외선 카메라(511)를 이용하여 촬영한 영상을 안티드론 시스템으로 전송하는 단계(S100); 상기 안티드론 시스템에서 상기 촬영된 영상을 분석하여 악용된 드론(10)이 있는지 탐색하는 단계(S200); 상기 탐색하는 단계(S200)에서 악용된 드론(10)이 탐색되면, 상기 무력화드론(510)이 상기 드론(10)으로 접근하는 단계(S300); 상기 무력화드론(510)이 교란신호 발생 및 포획 그물(512) 발포로 상기 드론(10)을 무력화시키는 단계(S400); 상기 안티드론 시스템이 상기 드론(10)이 무력화 되었는지 확인하는 단계(S500); 상기 드론(10)이 무력화 되었을 경우, 추락하는 지점을 계산하는 단계(S600); 및 상기 계산하는 단계(S600)에서 계산된 지점을 상기 안티드론 시스템의 관리자에게 알리는 단계(S700)를 포함하는 것을 특징으로 한다.
상품 상세설명

상품문의
교환/반품










