

추천상품
1선로 통신을 이용한 디스플레이 장치
₩ 5,000,000
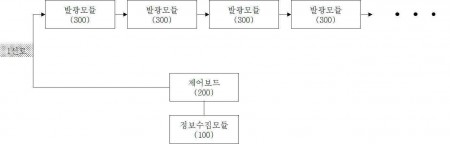
본 발명에 의한 1선로 통신을 이용한 디스플레이 장치는 현장센서 또는 관리자 단말기를 통해 현장데이터를 수신하여, 데이터를 수집하는 정보수집모듈(100); 상기 정보수집모듈(100)에서 수집한 데이터를 연산하여 제어신호를 생성하고 발광모듈(300)의 구동을 제어하는 제어보드(200); 및 상기 제어보드(200)에서 생성된 제어신호를 바탕으로 현장의 상황을 색으로 나타내는 발광모듈(300)을 포함하여 구성된다. 본 발명에 의한 1선로 통신을 이용한 디스플레이 장치에 의하면, 발광모듈(300)을 연속으로 직렬연결이 가능하기 때문에, 추가 확장을 용이하게 할 수 있다. 또한, 데이터신호를 통해 LED를 개별로 빨간색, 파란색 및 초록색 256단계로 구분이 가능하여 여러 가지 색상을 표현할 수 있다. 또한, 정전류 LED드라이버가 구성되어 주야간에 휘도 조절이 가능하여 눈의 피로를 줄일 수 있다.
피킹로봇을 포함한 물류 이송 시스템
₩ 5,000,000
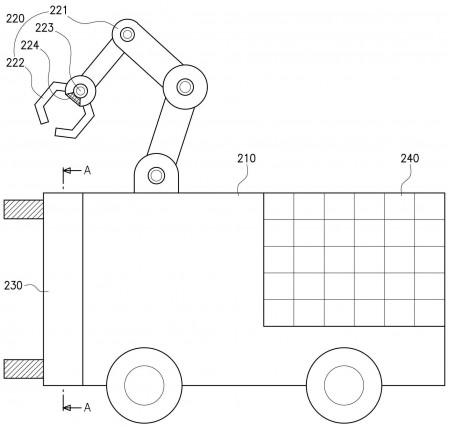
본 발명은 랙에 적재된 물품 중 출고할 물품만 피킹하여 설정 목적지로 이송시킬 수 있도록 상기 랙에 선택적으로 결합되는 피킹로봇을 포함한 물류 이송 시스템에 관한 것이다. 본 발명의 실시 예에 따른 피킹로봇을 포함한 물류 이송 시스템은 복수의 수직랙 및 수평랙으로 구성되어 하나 이상의 물품이 적재되는 적재공간이 형성되는 랙; 상기 랙에 선택적으로 결합되며 상기 물품을 피킹하여 설정된 목적지로 이송시키는 피킹로봇; 및 상기 랙과 피킹로봇의 작동을 제어하는 중앙서버;로 구성된다. 상기 랙은 결합 바디와, 상기 결합 바디에 형성되어 상기 피킹로봇이 결합되도록 하는 결합홀과, 상기 결합 바디를 승강시키는 승강부를 더 포함한다. 상기 피킹로봇은 이동 및 가감속을 위한 동력을 제공하는 제1구동부 및 상기 결합홀과 선택적으로 결합되도록 동력을 제공하는 제2구동부를 포함하는 본체와, 상기 본체 상측에 구비되어 상기 물품을 파지하는 로봇암과, 상기 본체 전방에 구비되며, 상기 제2구동부로부터 동력을 제공받아 상기 결합홀과 결합 또는 결합 해제되는 어태치먼트로 구성되어, 상기 피킹로봇은 결합홀에 결합된 후 승강부에 의해 물품 위치로 승강된다. 이러한 본 발명에 의하면 피킹로봇이 수직랙에 결합된 후 수직랙을 따라 승강 가능함으로써, 랙에 적재된 물품 중 출고할 물품만 피킹하여 설정 목적지까지 이송시킬 수 있는 이점이 있다.
물류 이송 시스템 및 방법
₩ 5,000,000
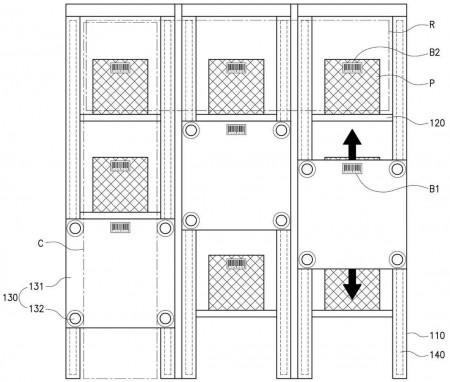
본 발명은 랙에 적재된 물품 중 출고할 물품만 피킹하여 설정 목적지로 이송시킬 수 있도록 상기 랙에 선택적으로 결합되는 물류 이송 시스템 및 방법에 관한 것이다. 본 발명의 실시 예에 따른 물류 이송 시스템은 복수의 수직랙 및 수평랙으로 구성되어 복수의 열과 행으로 구분되는 적재공간이 형성되며, 상기 적재공간에 물품이 하나 이상 적재되는 랙; 본체와, 상기 본체 전방에 구비되어 상기 랙과 선택적으로 결합되는 어태치먼트와, 상기 본체 일측에 구비되어 상기 물품을 파지하는 로봇암으로 구성되어, 상기 물품을 설정 목적지로 이송시키는 피킹로봇; 및 상기 랙과 피킹로봇의 작동을 제어하는 중앙서버;로 구성된다. 그리고 상기 랙은 상기 열마다 구비되는 결합 바디와, 상기 결합 바디에 형성되어 상기 어태치먼트와 회전 체결되는 결합홀과, 상기 결합 바디를 승강시키는 승강부를 더 포함한다. 또한, 상기 결합홀은 상기 어태치먼트와 회전 체결되는 홀부와, 상기 어태치먼트가 홀부 내측으로 끼움 삽입되도록 가이드하는 가이드부가 형성되어, 상기 피킹로봇이 승강부에 의해 물품 위치로 승강된다. 이때, 상기 가이드부는 상기 결합 바디 내측으로 갈수록 수직 단면적이 점차 감소하는 형상으로 형성되는 것을 특징으로 한다. 이러한 본 발명에 의하면 피킹로봇이 수직랙에 결합된 후 수직랙을 따라 승강 가능함으로써, 랙에 적재된 물품 중 출고할 물품만 피킹하여 설정 목적지까지 이송시킬 수 있는 이점이 있다.
영상의 움직임 감지 기능을 이용한 실내기 제어 장치
₩ 5,000,000
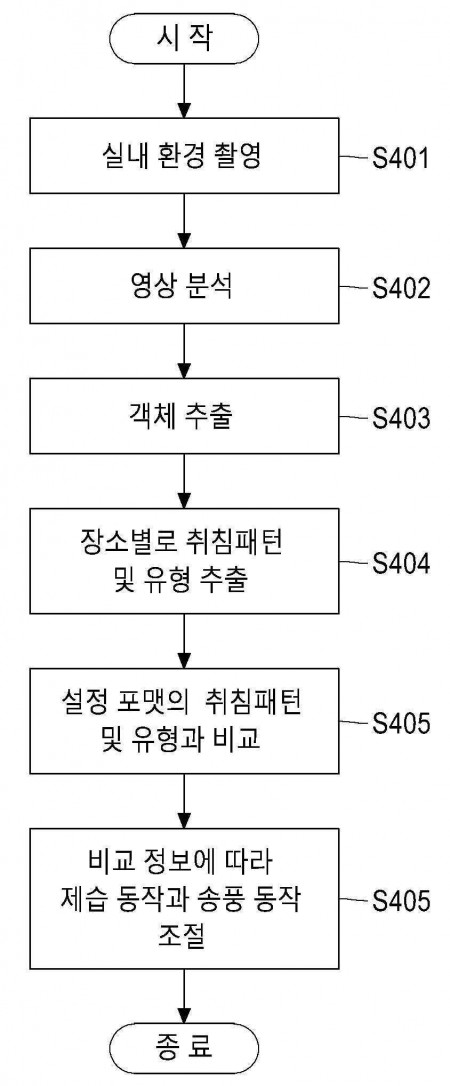
실시예는 영상의 움직임 감지 기능을 이용한 실내기 제어 장치에 관한 것이다. 구체적으로, 이러한 장치는 실외기에 구비되어, 유입되는 냉매를 응축하여 고압의 기체 냉매를 토출하는 응축기; 실내로 송풍을 제공하는 실내 송풍팬; 실내의 주변 상황을 촬영하는 촬영 장치; 를 포함한다. 그리고, 실내와 실외의 여러 가지 환경 요소를 측정하기 위한 실내 센서부와 실외 센서부; 실내 공기에 포함된 습기를 제거하기 위한 제습 모듈; 을 포함한다. 그리고, 상기 응축기의 동작을 선택적으로 제어하고, 상기 촬영 장치와, 상기 실내 센서부 및 상기 실외 센서부의 환경 요소 측정 결과에 따라 상기 실내 송풍팬 및 상기 제습 모듈의 동작을 상이하게 제어하는 제어부; 를 포함한다. 특히, 이러한 상태에서 상기 제어부는 아래의 동작을 수행한다. 먼저, 상기 촬영 장치에서 촬영된 영상신호를 수집한다. 그리고, 취침자를 포함한 설정 객체를 추출한다. 다음, 추출된 상기 객체의 자세와 모션 움직임을 포함하여 객체의 취침패턴 및 이에 따른 유형을 확인한다. 상기 확인된 취침패턴 및 유형과, 설정 포맷에 따른 취침패턴 및 유형을 비교하고, 어떠한 취침패턴 및 유형에 속하는지 파악한다. 그래서, 해당 취침패턴 및 유형에 대응하여, 상기 실내 센서부 및 상기 실외 센서부의 환경 요소 측정 결과에 따라 상기 실내 송풍팬 및 상기 제습 모듈의 동작을 각기 상이하게 제어한다. 이러한 경우, 상기 포맷은 아래와 같다. 구체적으로는, 영상신호로부터 다수의 상이한 장소와 취침자 유형별로의 취침패턴 및 유형마다 자세와 모션, 움직임 정보를 분류한다. 그리고, 실제 상황을 반영하도록, 각각의 유형별로 실내의 활동영역을 특정해서, 활동영역에 해당하는 화면에서 MOT(Multi Object Tracking)에 의한 객체의 움직임 좌표 분포 정보를 위의 취침패턴 및 유형별로 분류한다. 다음, 각각의 취침패턴 및 유형별로 각각 자세와 모션, 움직임 정보, 움직임 좌표 분포를 조합, 학습함으로써, 취침패턴이 도출되는 포맷이 정의된다. 그래서, 이에 따라 각각의 취침패턴 유형별로 각각의 특징을 나타내는 취침패턴을 산출하기 위한 독립변수(취침패턴 및 유형별로의 특징을 나타내는 취침패턴) 및 종속변수(자세와 모션, 움직임 정보 등과 MOT에 의한 객체의 움직임 좌표 분포 정보)를 설정한다. 이를 통해, 이렇게 설정된 자세와 모션, 움직임 정보 및 객체의 움직임 좌표 분포 정보로 학습 및 훈련 정보를 구성하여 만든다. 이를 통해, 다수의 상이한 실내기 설치장소와 취침유형별로 맞추어서 영상의 움직임 감지 기능을 이용하여 실내 사람의 행동거지를 상이하게 파악하고, 에어컨의 온도를 자동으로 제어함으로써, 실내 상태를 적절하게 장소와 취침유형에 맞게 조절, 유지한다.

실내공기 살균과 IoT 제어 및 모니터링 기능을 가진 스마트 냉동 공조 시스템
₩ 5,000,000
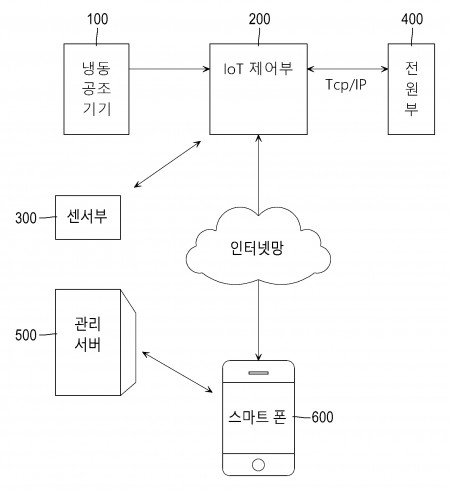
본 발명은 실내공기 살균과 IoT 제어 및 모니터링 기능을 가진 스마트 냉동공조 시스템에 관한 것이다. 본 발명은 냉동 공조 기기와 상기 냉동 공조 기기를 작동시키고, 사물인터넷 기능이 발생할 수 있도록 연결시켜 주는 IoT 제어부와 상기 IoT 제어부와 연결되어 감지정보를 획득 및 외부 환경에 따라 제어되는 센서부와 상기 IoT 제어부와 인터넷 포트로 연결되며, 상기 IoT 제어부의 작동에 의하여 상기 냉동 공조 기기에 전원을 발생시키는 전원부와 상기 IoT 제어부와 네트워크 연결되고, 상기 IoT 제어부로부터 전달되는 냉동 공조 기기의 상태 정보를 외부로 전달하고, 입력되는 운전 지시를 상기 IoT 제어부에 전달하는 관리 서버와 상기 관리 서버로부터 전달되는 냉동 공조 기기들의 상태 정보를 표시 입력하고, 상기 표시 입력되는 운전 지시를 상기 관리 서버로 전달하는 단말기; 및 상기 단말기에 실내의 환경을 분석한 정보를 전달하는 인공지능 모듈을 포함하는 것을 특징으로 한다.
IoT 제어 및 모니터링 기능을 가진 스마트 냉동 공조 시스템
₩ 5,000,000
본 발명은 IoT 제어 및 모니터링 기능을 가진 스마트 냉동공조 시스템에 관한 것이다. 본 발명은 냉동 공조 기기와 상기 냉동 공조 기기를 작동시키고, 사물인터넷 기능이 발생할 수 있도록 연결시켜 주는 IoT 제어부와 상기 IoT 제어부와 연결되어 감지정보를 획득 및 외부 환경에 따라 제어되는 센서부와 상기 IoT 제어부와 인터넷 포트로 연결되며, 상기 IoT 제어부의 작동에 의하여 상기 냉동 공조 기기에 전원을 발생시키는 전원부와 상기 냉동 공조 기기의 데이터를 전송받아 디스플레이하기 위한 스마트폰과 상기 냉동 공조 기기에 구비되어, 실시간으로 운전 상태를 감지하는 운전상태 감지수단; 및 상기 운전상태 감지수단으로부터 감지 데이터를 제공받아 운전 사이클의 이상상태 유무를 판단하는 관리자 단말기;를 포함하는 것을 특징으로 한다.
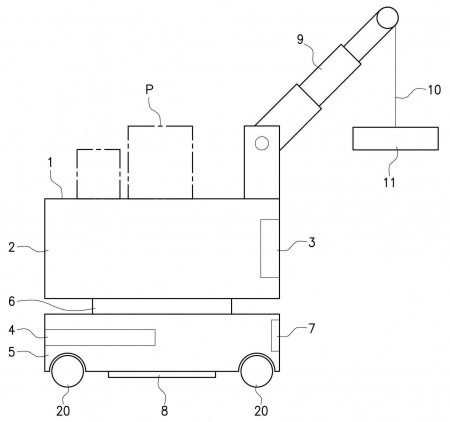
구명환 발사장치를 구비한 쌍동형 구조로봇
₩ 5,000,000
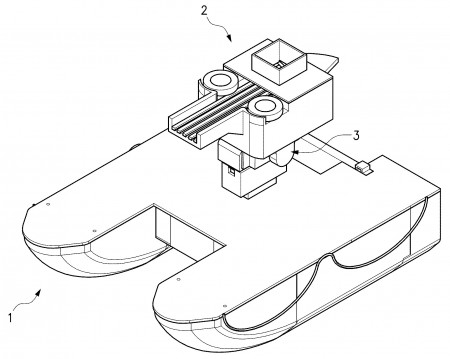
본 발명은 구명환 발사장치를 구비한 쌍동형 구조로봇에 관한 것으로, 해상 구조를 위해 구명환을 발사하는 장치 자체가 쌍동형 선박 형태의 로봇으로 자율주행하도록 구성함으로써 다수의 구명환을 신속하게 공급할 수 있도록 하는, 구명환 발사장치를 구비한 쌍동형 구조로봇에 관한 것이다. 본 발명의 실시 예에 따르면, 쌍동형으로 형성되는 본체(1); 및 상기 본체(1)의 상부에 설치되는 구명환 발사장치(2);를 포함하되, 상기 구명환 발사장치(2)는: 소정의 구명환을 투입받는 투입부(21); 상기 투입부(21)를 통해 투입된 구명환이 안착되고, 구명환이 발사되는 경로를 제공하도록 소정의 길이를 가지는 레일(22); 상기 레일(22)의 후방에 배치되어, 레일(22)에 안착된 구명환을 전방 방향으로 소정의 거리만큼 이송시키는 이송장치(23); 및 상기 이송장치(23)에 의해 이송된 구명환이 전방 방향으로 발사되도록 소정의 속력을 부여하는 가속장치(24);를 포함하여, 상기 투입부(21)를 통해 투입된 구명환이 이송장치(23)에 의해 전방으로 이송되어 가속장치(24)에 접촉했을 때, 가속장치(24)에 의해 구명환이 발사되도록 제어되는, 구명환 발사장치를 구비한 쌍동형 구조로봇을 제공한다.
냉각탑에 적용되는 냉각팬 장치
₩ 5,000,000
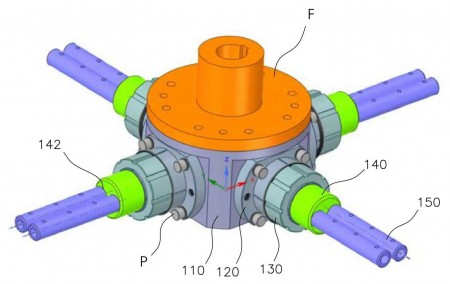
본 발명은 냉각탑에 적용되는 냉각팬 장치에 관한 것으로, 냉각탑에 내부에 설치되어 구동모터의 구동력에 의해 회전되는 냉각팬 장치에 있어서, 상기 구동모터와 연결되어 회전되는 허브바디, 상기 허브바디의 외측면에 방사형으로 체결되며, 전단에 관통홀이 형성된 복수 개의 홀더, 상기 홀더의 관통홀에 끼움 장착되며, 원통형상으로 형성되되 길이방향으로 삽입홀이 관통 형성된 조인트, 상기 홀더의 외주연에 장착되어 조인트를 압박 고정하는 너트, 상기 조인트의 삽입홀에 삽입되는 픽스바 및 상기 픽스바에 고정되는 날개부를 포함하는 것으로, 본 발명은 로터와 날개부를 연결하기 위해 중공체형상의 픽스바를 사용함으로써 기존의 중실축에 비해 무게를 저감시키고, 하나의 날개부가 두 개의 픽스바에 의해 지지되도록 하여 날개부와 픽스바의 연결부를 보강하는 현저한 효과가 있다.

마찰 분쇄 장치
₩ 5,000,000
본 발명은 비교적은 간단한 구조이면서 높은 분쇄효율을 제공하는 셀룰로오스 분쇄용 마찰 분쇄 장치를 제공하는 것을 그 목적으로 합니다. 상기의 목적을 달성하기 위하여 본 발명은, 분쇄모듈과 상기 분쇄모듈에 분쇄용 원료를 공급하는 원료모듈과 상기 분쇄모듈에 가압된 유체를 공급하는 가압모듈을 포함하는 마찰 분쇄 장치에 있어서, 상기 분쇄모듈은: 내부에 공간이 형성된 케이싱; 상기 케이싱 중앙에 수직으로 회전 가능하게 결합하는 회전축; 원주면에 홈이 형성되고, 상기 회전축에 고정되는 상단회전판; 상기 상단회전판의 원주면과 일정거리 이격되어 배치되고 돌기부가 형성된 내경부를 포함여 상기 케이싱에 고정되는 상단고정부; 상기 회전축에 고정되는 하단회전판; 및 상기 가압모듈에서 공급되는 가압 유체에 의하여 상기 하단회전판의 상면에 배치된 원료를 가압하는 가압부를 포함하는 것을 특징으로 한다.
경사도 조절이 가능한 신발
₩ 5,000,000
본 발명은 경사도 조절이 가능한 신발에 관한 것으로, 구체적으로는 경사면의 기울기를 측정하여 경사각도만큼 신발의 뒷꿈치에 경사를 주어 경사가 있는 곳에서도 신발이 수평상태를 유지하여 경사면을 계단을 오르는 것처럼 이동할 수 있도록 하는 경사도 조절이 가능한 신발에 관한 것이다. 본 발명은 오르막을 보행시 경사도를 측정하여 측정된 경사도에 따라 신발의 경사도가 조절되어 편하게 오르막을 오를 수 있도록 함으로서 특정 신체부위에 과도하게 힘이 들어가는 것을 방지하는 효과가 있다.
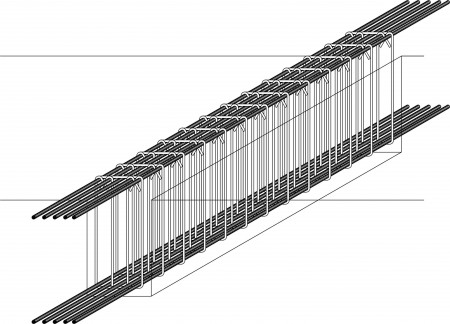
최적화 개량스터럽과 이를 적용한 철근콘크리트보 구조물 및 시공방법
₩ 5,000,000
본 발명은 최적화 개량스터럽과 이를 적용한 철근콘크리트보 구조물 및 시공방법에 관한 것으로 구체적으로는 개량스터럽의 측면 수직부의 단면적을 중앙부의 사각형 형상과 사각형 형상의 양단에 반원을 붙인 형상으로 형성하고 바닥부의 단면적이 측면 수직부와 동일하거나 상부가 삭제된 하부 1/2의 단면으로 형성시킨 개량스터럽을 통해 철근량을 감소시켜주어 작업성과 품질관리가 유리하도록 하는 철근콘트리트보 구조물과 이의 시공방법에 관한 것이다. 본 발명은 보의 양측에 위치한 수직부의 직경은 크게 하고 바닥에 위치한 것은 수직부 단면과 동일한 단면을 가지거나 수직부 단면의 1/2 단면으로 이루어진 개량스터럽을 통하여 보 내부에 사용되던 보강근의 갯수를 줄일 수 있으므로 배근 간격이 더 넓어지고 그 개수가 최소화 됨으로서 비용절감과 작업시간을 절약시키도록 하는 효과가 있다.
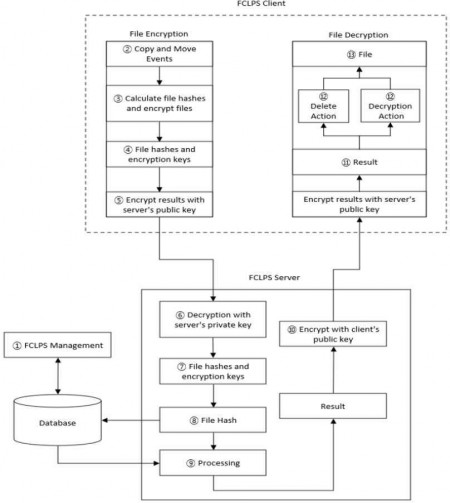
파일 복사 유출 방지 방법
₩ 5,000,000
본 발명은 파일 복사 유출 방지 방법에 관한 것으로, 더 상세하게는 기밀 파일 보호를 위해 기밀 파일의 허가받지 않은 복사 또는/및 이동을 차단하면서도 클라이언트 컴퓨터의 처리 부하를 최소화하는, 파일 복사 유출 방지 방법에 관한 것이다. 본 발명의 실시 예에 따르면, 사용자기기에서 파일에 대한 복사 또는 이동 이벤트가 발생하는지 탐지하는 단계; 상기 복사 또는 이동 이벤트가 탐지된 경우, 상기 파일의 해시값을 계산하는 단계; 상기 파일에 대해 무작위의 문자열을 대칭키로 생성하는 단계; 상기 파일을 상기 대칭키로 암호화하는 단계; 상기 파일의 해시값과 대칭키를 서버로 송신하는 단계; 상기 서버로부터 기밀 파일 여부를 수신받는 단계; 상기 파일이 기밀 파일인 경우: 상기 파일을 삭제하는 단계; 및 상기 파일이 일반 파일인 경우: 상기 파일을 복호화하는 단계;를 포함하는, 파일 복사 유출 방지 클라이언트 제어 방법을 제공한다.

로봇암을 구비한 물류센터용 자율주행로봇
₩ 5,000,000
본 발명은 로봇암을 구비한 물류센터용 자율주행로봇에 관한 것으로, 더 상세하게는 물류센터에서 작업을 위해 지정된 소정의 경로를 따라 자율주행하되, 작업 진행중에는 해당 작업과 연계된 작업자의 위치에 따라 작업자를 트래킹하는, 로봇암을 구비한 물류센터용 자율주행로봇에 관한 것이다. 본 발명의 실시 예에 따르면, 소정의 면적을 가지는 적재대가 상부에 형성되는 몸체; 상기 몸체에 구비되어, 물품을 적재대에 적재하거나 적재대에 있는 물품을 이재하는 로봇암; 상기 몸체에 구비되어, 소정의 물류정보를 도시하는 디스플레이; 상기 몸체에 구비되는 카메라; 탈착이 가능하도록 결합되는 배터리; 상기 배터리에 전력을 충전하도록 구비되는 충전모듈; 상기 몸체의 하부에 구비되는 베이스; 상기 몸체와 베이스 사이에 구비되며, 몸체를 베이스로부터 1축 방향으로 회전시키는 몸체회전부; 상기 베이스에 구비되어, 이동과 관련된 소정의 위치정보를 수집하는 센서부; 상기 베이스에 구비되어, 몸체를 이동시키는 이동수단; 및 상기 로봇암 및 이동수단을 제어하는 제어부;를 포함하고, 상기 제어부는: 작업자와 상호작용하도록 지정된 작업공간 내에서는 상기 작업자를 트래킹하며 지정된 작업을 수행하는 트래킹단계; 및 상기 상호작용이 종료되었을 때 또는 새로운 상호작용을 입력받았을 때에는 장애물 회피 기동하며 상기 작업공간으로 이동하는 이동단계;를 수행하는, 로봇암을 구비한 물류센터용 자율주행로봇을 제공한다.
물류센터용 AR글래스 연동형 자율주행로봇
₩ 5,000,000
본 발명은 물류센터용 AR글래스 연동형 자율주행로봇에 관한 것으로, 더 상세하게는 물류센터에서 작업을 위해 지정된 소정의 경로를 따라 자율주행하되, 작업 진행중에는 해당 작업과 연계된 작업자의 위치에 따라 작업자를 트래킹하는, 물류센터용 AR글래스 연동형 자율주행로봇에 관한 것이다. 본 발명의 실시 예에 따르면, 소정의 면적을 가지는 적재대가 상부에 형성되는 몸체; 상기 몸체에 구비되어, 물품을 적재대에 적재하거나 적재대에 있는 물품을 이재하는 로봇암; 상기 몸체에 구비되어, 소정의 물류정보를 도시하는 디스플레이; 상기 몸체에 구비되는 카메라; 탈착이 가능하도록 결합되는 배터리; 상기 배터리에 전력을 충전하도록 구비되는 충전모듈; 상기 몸체의 하부에 구비되는 베이스; 상기 몸체와 베이스 사이에 구비되며, 몸체를 베이스로부터 1축 방향으로 회전시키는 몸체회전부; 상기 베이스에 구비되어, 이동과 관련된 소정의 위치정보를 수집하는 센서부; 상기 베이스에 구비되어, 몸체를 이동시키는 이동수단; 및 상기 로봇암 및 이동수단을 제어하는 제어부;를 포함하고, 상기 제어부는: 작업자와 상호작용하도록 지정된 작업공간 내에서는 상기 작업자를 트래킹하며 지정된 작업을 수행하는 트래킹단계; 및 상기 상호작용이 종료되었을 때 또는 새로운 상호작용을 입력받았을 때에는 장애물 회피 기동하며 상기 작업공간으로 이동하는 이동단계;를 수행하는, 물류센터용 AR글래스 연동형 자율주행로봇을 제공한다.

DRDoS 공격 대응 방법, DRDoS 공격 대응 프로그램 및 DRDoS 공격 대응 기능을 구비한 서버 컴퓨터
₩ 5,000,000
본 발명은 DRDoS 공격 대응 방법, DRDoS 공격 대응 프로그램 및 DRDoS 공격 대응 기능을 구비한 서버 컴퓨터에 관한 것으로, 더 상세하게는 외부에 공개된 Memcached 서버를 반사서버로 이용하여 응답 패킷의 증폭을 통해 트래픽 병목 현상을 발생시키는 DRDoS 공격에 대응하기 위하여, 공격 시도 패킷이 확인되었을 때 Memcached 서버들의 메모리를 초기화함으로써 공격 효과를 현저하게 감소시키는, DRDoS 공격 대응 방법, DRDoS 공격 대응 프로그램 및 DRDoS 공격 대응 기능을 구비한 서버 컴퓨터에 관한 것이다.
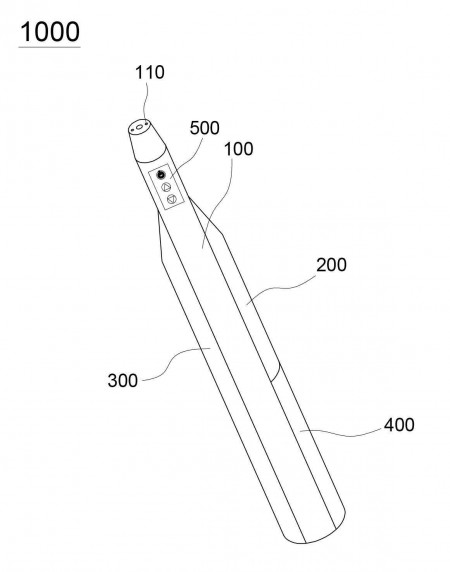
치약 분사를 통한 구강 세정 장치
₩ 5,000,000
본 발명은 치약 분사를 통한 구강 세정 장치에 관한 것으로, 일단에 형성되는 분사구와, 상기 분사구와 연통되는 분사 노즐을 포함하는 세정 몸체와, 상기 세정 몸체의 외면에 결합되는 치약 저장통과, 상기 치약 저장통과 분사 노즐 사이에 연결되는 제1 연결 노즐을 포함하는 치약 저장부와, 상기 세정 몸체의 외면에 결합되는 급수 저장통과, 상기 급수 저장통과 분사 노즐 사이에 연결되는 제2 연결 노즐을 포함하는 물 저장부와, 상기 세정 몸체의 외면에 결합되는 산소 저장통과, 상기 산소 저장통과 분사 노즐 사이에 연결되는 제3 연결 노즐을 포함하는 고압 산소 저장부 및 상기 세정 몸체의 일단에 결합되며, 상기 치약 저장부, 물 저장부 및 고압 산소 저장부에 저장된 치약, 급수 및 산소를 분사구로 배출되는 것을 제어하는 제어부를 포함하는 것을 특징으로 한다.
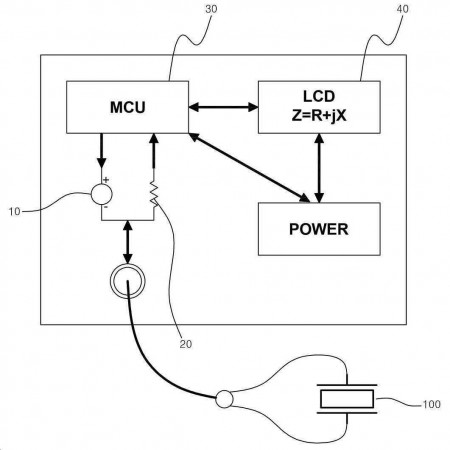
압전소자의 임피던스 매칭 회로를 포함한 집속점 변경 고강도 집속초음파
₩ 5,000,000
본 발명은 압전소자의 임피던스 매칭 회로를 포함한 집속점 변경 고강도 집속초음파에 관한 것으로, 핸드피스 본체, 상기 본체에 장착되어 초음파를 발생시키는 압전소자를 포함하는 초음파 발생부, 상기 압전소자의 임피던스를 계측하는 계측부, 상기 본체에 장착되어 본체의 동작을 감지하는 센서부, 상기 본체에 입력된 입력신호 및 상기 센서부 및 계측부에 의해 감지된 측정값에 따라 초음파출력을 제어하는 제어부를 포함하는 것을 특징으로 하며, 본 발명은 압전소자의 회로특성을 검출하는 시스템을 구축하고, 구축된 시스템으로 검출된 압전소자의 회로 특성을 데이터베이스로 저장하여 압전소자의 임피던스와 초음파 출력 장비의 임피던스가 용이하게 매칭되도록 하는 현저한 효과가 있다.

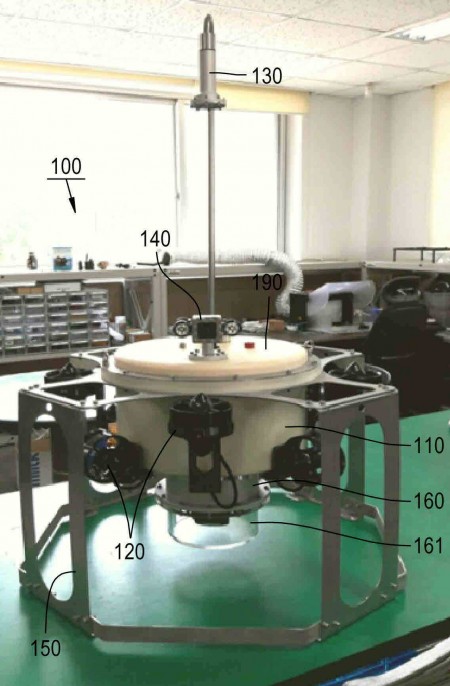
정수기용 피팅조립체 조립 장치
₩ 5,000,000
본 발명은 정수기용 피팅조립체 조립 장치에 관한 것으로, 티자형 커넥터의 양단에 일자형 커넥터와 엘보형 커넥터를 압착 조립하기 위한 정수기용 피팅조립체 조립장치에 있어서, 작업대, 상기 작업대의 상면에 설치되며, 구동수단에 의해 일정주기로 일정각도만큼 회전 가능하게 마련되는 턴테이블, 상기 턴테이블의 상면에 방사형으로 장착되며, 상면에 피팅조립체가 안착되는 안착공간이 형성된 복수 개의 지그, 상기 턴테이블의 저면에 배치되도록 작업대의 상면에 설치되되, 신축됨에 따라 끝단부가 상기 턴테이블을 선택적으로 관통하여 턴테이블을 고정시키는 고정실린더, 상기 턴테이블의 상면에 상기 복수 개의 지그의 측방에 각각 설치되어 상기 지그에 안착된 피팅조립체를 고정시키는 고정유닛, 상기 턴테이블의 측방에 설치되며, 상기 지그에 일자형 커넥터를 순차 공급하기 위한 공급부 및 상기 지그에 안착된 티자형 커넥터의 양단에 엘보형 커넥터와 일자형 커넥터가 각각 압착 조립되도록 하는 조립부를 포함하는 것으로, 본 발명은 피팅조립체가 압착 조립되도록 하여 제품의 품질이 향상되고, 작업성 및 생산성이 증대되며 가격 경쟁력이 확보되는 현저한 효과가 있다.
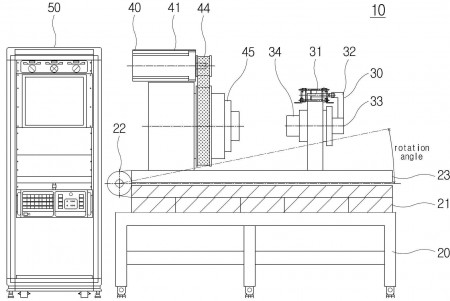
서모커플형 화재감지센서의 용접전용 작업장치
₩ 5,000,000
본 발명은 일측 및 타측에 서모커플형 화재감지센서에 포함되는 화재감지선의 제1 용접부재(1) 및 제2 용접부재(2)가 각각 장착되어, 상기 제1 용접부재(1) 및 상기 제1 용접부재(1)의 일측에 임시로 고정된 상기 제2 용접부재(2)를 레이저 빔으로 용접 결합하기 것으로, 좌우 또는 전후 방향으로 이동 가능하고, 시계 또는 반시계 방향으로 회동 가능하게 구비되는 이송부재(20), 상기 이송부재(20)의 상부 일측에 좌측 또는 우측 방향으로 이동 가능하게 구비되는 유격방지부재(30) 및 상기 이송부재(20)의 상부 타측에 좌우 방향의 회전축을 기준으로 회동 가능하게 구비되는 안착부재(40)를 포함하고, 상기 유격방지부재(30)는 일측에 장착되는 상기 제2 용접부재(2)를 좌측 방향으로 이동시켜, 상기 제2 용접부재(2)를 사전에 설정된 정위치에 배치시키고, 상기 안착부재(40)는 일측에 장착되는 상기 제1 용접부재(1)를 회동시켜, 상기 제1 용접부재(1)에 임시로 고정된 상기 제2 용접부재(2)를 일방향으로 회동시키는 것을 특징으로 한다.
무인 수중 로봇 장치 및 그 제어시스템
₩ 5,000,000
본 발명은 무인 수중 로봇 장치와 그 제어시스템에 관한 것이다. 본 발명은 수중에서 중성부력을 유지시키고, 방수기능을 갖는, 가볍고 내식성을 갖는 소재로 형성된 원통형의 본체와 상기 본체와 일정간격으로 고정, 형성되어, 상기 본체에 동력을 전달하여 전후, 상하좌우로 이동시키는 적어도 1개 이상의 스러스터(thruster)와 상기 본체의 상부에 형성되어, 현재 위치를 실시간으로 추적할 수 있도록 하여 상기 본체를 촬영하는 전방 카메라부와 상기 전방카메라)와 일정간격 이격 형성되어, 상기 본체에 인접한 주변환경을 촬영하는 옴니(omni) 카메라부와 상기 본체의 하부에 연결 형성되어, 알류미늄 재질의 내식성을 가지는 부재로 이루어지며, 수중에서 중성부력을 유지시키고, 방수기능을 갖는 메인 프레임과 상기 본체의 아래방향으로 형성되어, 수중을 360도 영상촬영하는 점검카메라부과 상기 본체의 상부에 배치되어, 외부로부터 전원을 공급과 제어를 받을수 있는 커넥터 연결부와 상기 본체의 하부에 형성되어, 야간에 촬영의 용이함과 위치를 표시할수 있도록 하기 위한 발광부와 상기 본체에 배치되어 이더넷(Ethernet) 통신방식을 적용하며, 상기 본체의 위치를 추적하기 위해, 외부와의 무선통신을 수행하는 통신부 와 상기 본체의 일측에 형성되어 수심의 깊이를 감지하는 깊이 센서와 상기 전방카메라부, 상기 옴니 카메라부 및 상기 점검 카메라부를 제어하고, 촬영된 영상의 데이터를 저장할수 있도록 제어하는 제어부를 포함하는 것을 특징으로 한다.

무인 수중 로봇 장치
₩ 5,000,000
본 발명은 무인 수중 로봇 장치에 관한 것이다. 본 발명은 수중에서 중성부력을 유지시키고, 방수기능을 갖는, 가볍고 내식성을 갖는 소재로 형성된 원통형의 본체와 상기 본체와 일정간격으로 고정, 형성되어, 상기 본체에 동력을 전달하여 전후, 상하좌우로 이동시키는 적어도 1개 이상의 스러스터(thruster)와 상기 본체의 상부에 형성되어, 현재 위치를 실시간으로 추적할 수 있도록 하여 상기 본체를 촬영하는 전방 카메라부와 상기 전방카메라)와 일정간격 이격 형성되어, 상기 본체에 인접한 주변환경을 촬영하는 옴니(omni) 카메라부와 상기 본체의 하부에 연결 형성되어, 알류미늄 재질의 내식성을 가지는 부재로 이루어지며, 수중에서 중성부력을 유지시키고, 방수기능을 갖는 메인 프레임과 상기 본체의 아래방향으로 형성되어, 수중을 360도 영상촬영하는 점검카메라부과 상기 본체의 상부에 배치되어, 외부로부터 전원을 공급과 제어를 받을수 있는 커넥터 연결부와 상기 본체의 하부에 형성되어, 야간에 촬영의 용이함과 위치를 표시할수 있도록 하기 위한 발광부와 상기 본체에 배치되어 이더넷(Ethernet) 통신방식을 적용하며, 상기 본체의 위치를 추적하기 위해, 외부와의 무선통신을 수행하는 통신부를 포함하는 것을 특징으로 한다.
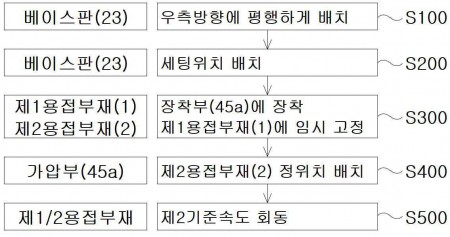
서모커플형 화재감지센서의 용접 방법
₩ 5,000,000
본 발명은 베이스판(23)이 우측 방향과 평행한 위치에 배치되는 제 1단계, 상기 베이스판(23)이 사전에 설정된 세팅위치에 배치되는 제 2단계, 제1 용접부재(1)가 장착부(45a)에 장착되고, 제2 용접부재(2)가 상기 제1 용접부재(1)에 임시로 고정되는 제 3단계, 상기 제2 용접부재(2)가 가압부(34b)에 의해 사전에 설정된 정위치에 배치되는 제 4단계, 상기 제1 용접부재(1) 및 제2 용접부재(2)가 사전에 설정된 제2 기준속도로 회동하는 제 5단계, 상기 제1 용접부재(1) 및 제2 용접부재(2)가 레이저 빔에 의해 용접 결합되어, 용접품(3)이 형성되는 제 6단계, 상기 가압부(34b)가 원위치로 복귀하는 제 7단계, 상기 용접품(3)이 상기 장착부(45a)로부터 제거되는 제 8단계 및 상기 베이스판(23)이 원위치로 복귀하고, 상기 장착부(45a)의 회동이 중지되는 제 9단계를 포함하는 것을 특징으로 한다.
펠티어소자를 통해 냉온 기능을 조절가능한 핸드피스
₩ 5,000,000
본 발명은 펠티어소자를 통해 냉온 기능을 조절가능한 핸드피스에 있어서, 원통형상의 핸드피스본체와, 상기 핸드피스본체의 일단에 형성되는 손잡이부를 포함하는 핸드피스유닛; 상기 핸드피스본체 내에 설치되어 인가되는 전원의 전류방향에 따라 냉온방향이 전환되어 발열작동 또는 흡열작동이 이루어지는 펠티어소자부와, 상기 펠티어소자부로부터 방출되는 열을 내부로 포집 및 냉각시키는 열포집부를 포함하는 펠티어소자유닛; 상기 펠티어소자유닛에 전원을 인가하는 전원유닛; 및 상기 핸드피스본체의 타단에 설치되며, 상기 펠티어소자부와 연결되어 상기 펠티어소자부로부터 냉열 또는 온열을 전달받아 외부로 방출하는 방열유닛;을 포함하는 것을 기술적 요지로 한다. 이에 의해 핸드피스를 통해 피부에 화장품의 유효성분 흡수를 최적화시키고 피부를 진정시킬 수 있도록 온열 기능 및 냉각 기능을 자유롭게 조절할 수 있는 효과를 얻을 수 있다.
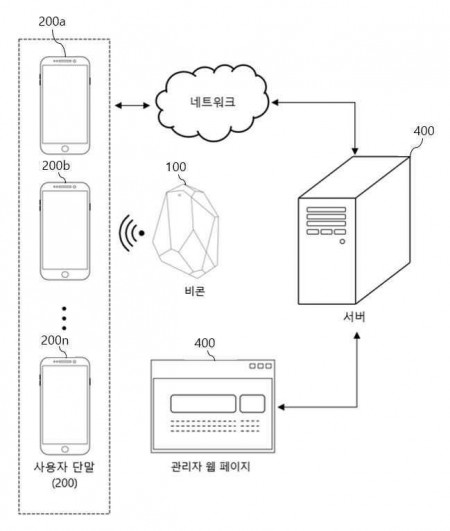
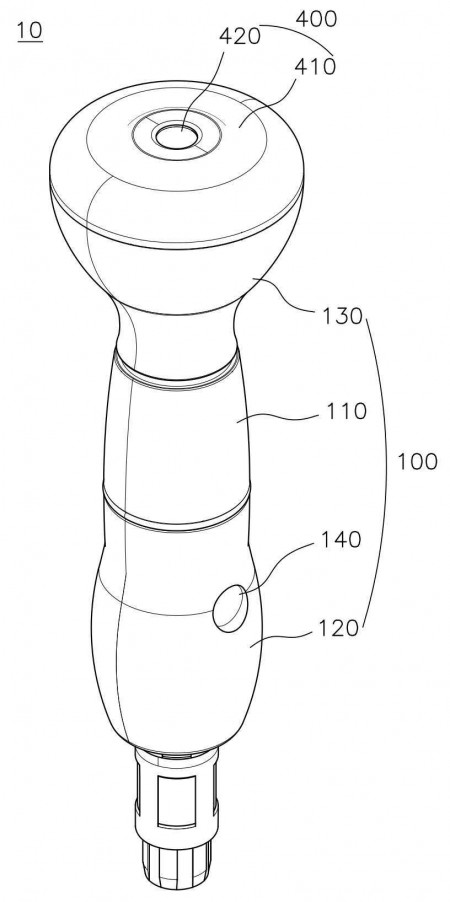
비콘을 이용한 출입자 명부 관리 시스템
₩ 5,000,000
본 발명은 비콘을 이용한 출입자 명부 관리 시스템에 관한 것으로, 코로나 19 등 감염병의 확산 시 역학 조사를 위해 기록하는 출입자 명부의 기록을 사용자의 별도의 행동 없이도 자동으로 기록하도록 함으로써 출입자 명부의 신뢰성을 향상시키는, 비콘을 이용한 출입자 명부 관리 시스템에 관한 것이다. 본 발명의 실시 예에 따르면, 시설물의 출입구에 배치되어, 소정의 패킷을 멀티캐스팅으로 송출하는 비콘; 상기 시설물에 출입하는 출입자가 구비하는 단말기; 및 상기 단말기와 통신하도록 연결되는 서버;를 포함하고, 상기 단말기는: 상기 출입자로부터 사전에 단말기 제어 권한을 허용받아, 백그라운드에서 동작하며 상기 패킷의 수신을 감지하는 수신모듈; 상기 수신모듈에서 -30dBm 이상의 크기를 가지는 패킷을 2초 이상 수신했을 때, 상기 시설물에 출입한 것으로 판단하는 출입판단모듈; 및 상기 출입판단모듈에서 출입이 판단되었을 때, 비콘에서 수신된 소정의 패킷에, 현재시간 및 단말기의 전화번호 정보를 부가하는 데이터처리모듈; 상기 데이터처리모듈에서 변환된 데이터를, 출입자의 조작 없이 자동으로 상기 서버에 송신하는 통신모듈;을 포함하여, 상기 출입자가 시설물에 출입할 때, 비콘에서 송출되는 패킷을 단말기에서 소정의 시간동안 감지했을 때 출입자가 해당 시설물에 출입한 것으로 판단하여 서버에 출입자의 출입 이력을 기록하는, 비콘을 이용한 출입자 명부 관리 시스템을 제공한다.

물류센터용 자율주행로봇
₩ 5,000,000
본 발명은 물류센터용 자율주행로봇에 관한 것으로, 더 상세하게는 물류센터에서 작업을 위해 지정된 소정의 경로를 따라 자율주행하되, 작업 진행중에는 해당 작업과 연계된 작업자의 위치에 따라 작업자를 트래킹하는, 물류센터용 자율주행로봇에 관한 것이다. 본 발명의 실시 예에 따르면, 소정의 면적을 가지는 적재대가 상부에 형성되는 몸체; 상기 몸체에 구비되어, 물품을 적재대에 적재하거나 적재대에 있는 물품을 이재하는 로봇암; 상기 몸체에 구비되어, 소정의 물류정보를 도시하는 디스플레이; 상기 몸체에 구비되는 카메라; 탈착이 가능하도록 결합되는 배터리; 상기 배터리에 전력을 충전하도록 구비되는 충전모듈; 상기 몸체의 하부에 구비되는 베이스; 상기 몸체와 베이스 사이에 구비되며, 몸체를 베이스로부터 1축 방향으로 회전시키는 몸체회전부; 상기 베이스에 구비되어, 이동과 관련된 소정의 위치정보를 수집하는 센서부; 상기 베이스에 구비되어, 몸체를 이동시키는 이동수단; 및 상기 로봇암 및 이동수단을 제어하는 제어부;를 포함하고, 상기 제어부는: 작업자와 상호작용하도록 지정된 작업공간 내에서는 상기 작업자를 트래킹하며 지정된 작업을 수행하는 트래킹단계; 및 상기 상호작용이 종료되었을 때 또는 새로운 상호작용을 입력받았을 때에는 장애물 회피 기동하며 상기 작업공간으로 이동하는 이동단계;를 수행하는, 물류센터용 자율주행로봇을 제공한다.
