

특허(전기전자)
상품 정보
상품 기본설명
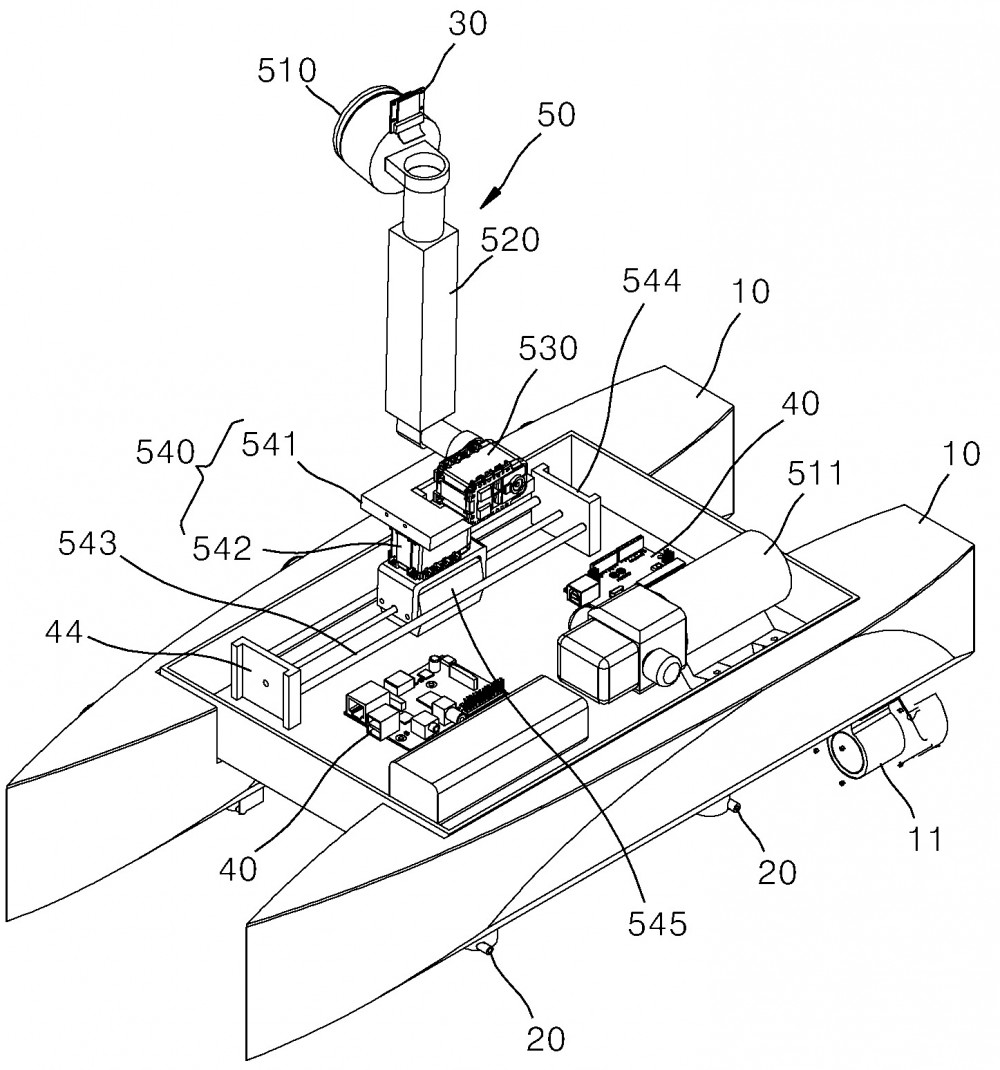
본 발명은 화재가 발생한 선박 또는 구조물에 대해서 방재작업을 수행하는 선박방재용 수상용 로봇에 있어서, 상기 소정의 적재공간을 제공하는 선체를 구비한 쌍동선(10)의 선미와 선수로부터 각각 소정의 이격거리에 위치하고, 선체의 바깥방향으로 추력을 제공하여 선박의 위치를 제어하는 워터젯(20)과; 상기 쌍동선(10)의 일측에 구비되어, 화재가 발생한 선박 또는 구조물의 화원의 위치를 측정하는 열화상 카메라부(30)와; 상기 열화상 카메라부(30)에서 전송되는 화염에 대한 크기와 형상에 대해서 파악하고, 소정의 크기로 화염영역을 분할하여 화원을 도출해내는 기능을 구비한 제어부(40)와; 상기 쌍동선(10)에 형성된 안착공간에 구비되고, 상기 제어부(40)에서 전송되는 신호에 따라 화원을 추적하여 화염을 제거하는 방재노즐이 구비된 로봇암부(50);를 포함하여 구성되고, 상기 선체의 일측에는 거리를 측정하는 초음파 센서(60)가 일개소 이상에 구비되어, 상기 워터젯(20)에 발생하는 추진력을 제어하여 화재가 발생한 지점과 소정의 거리를 유지하면서 화원을 추적하여 화원을 방재하는 스마트 화재진압 로봇선의 구성을 제공한다. 본 발명의 실시 예에 따른 스마트 화재진압 로봇선에 의할 때, 선박 또는 수상구조물 등에 화재발생시에 날씨나 기상환경 등의 영향을 받지 않고 실시간으로 효율적인 무인방재작업이 가능하게 하는 이점이 있다.
상품 상세설명

상품문의
교환/반품




