

특허(기계금속)
상품 정보
상품 기본설명
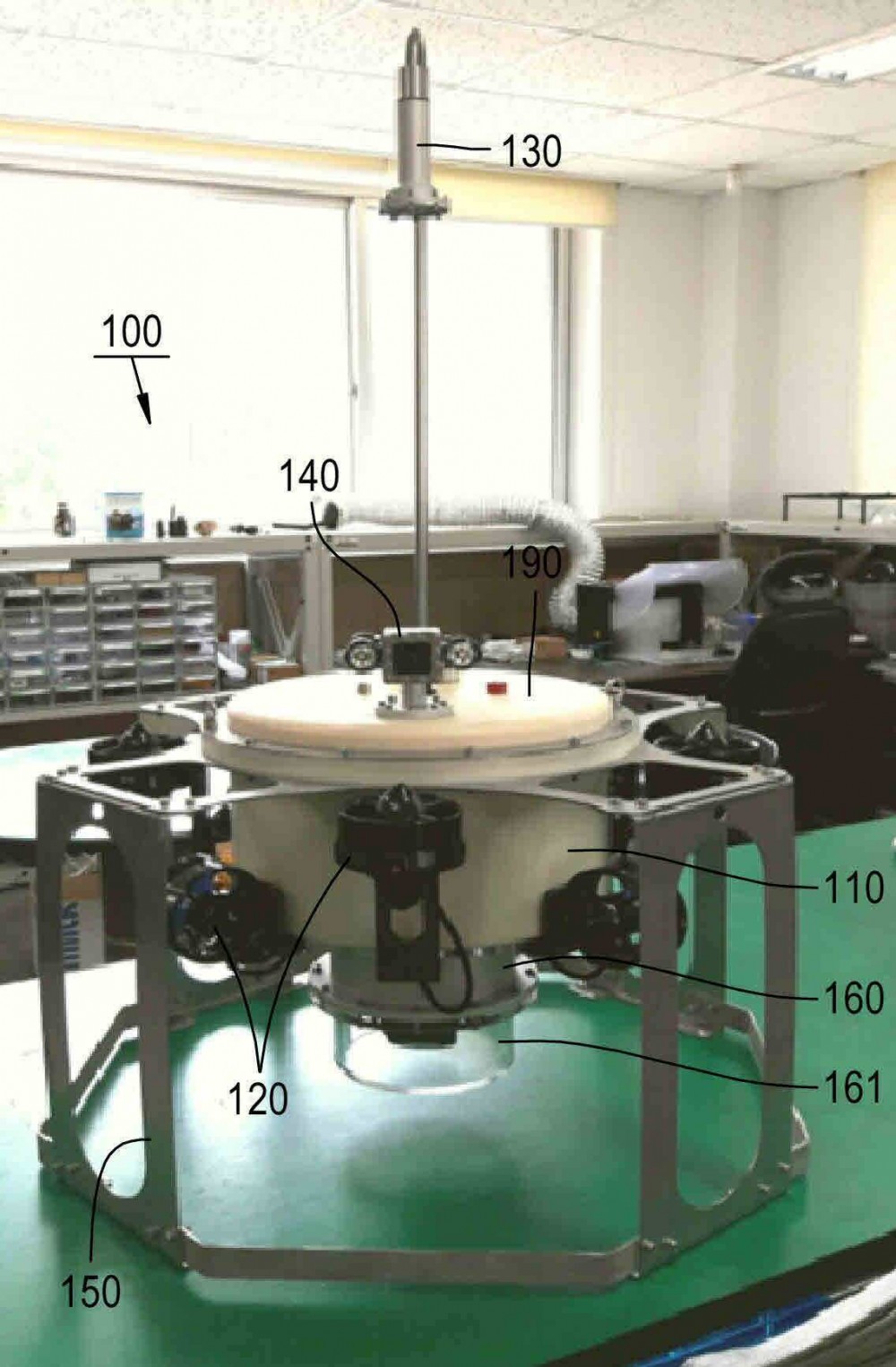
본 발명은 무인 수중 로봇 장치에 관한 것이다. 본 발명은 수중에서 중성부력을 유지시키고, 방수기능을 갖는, 가볍고 내식성을 갖는 소재로 형성된 원통형의 본체와 상기 본체와 일정간격으로 고정, 형성되어, 상기 본체에 동력을 전달하여 전후, 상하좌우로 이동시키는 적어도 1개 이상의 스러스터(thruster)와 상기 본체의 상부에 형성되어, 현재 위치를 실시간으로 추적할 수 있도록 하여 상기 본체를 촬영하는 전방 카메라부와 상기 전방카메라)와 일정간격 이격 형성되어, 상기 본체에 인접한 주변환경을 촬영하는 옴니(omni) 카메라부와 상기 본체의 하부에 연결 형성되어, 알류미늄 재질의 내식성을 가지는 부재로 이루어지며, 수중에서 중성부력을 유지시키고, 방수기능을 갖는 메인 프레임과 상기 본체의 아래방향으로 형성되어, 수중을 360도 영상촬영하는 점검카메라부과 상기 본체의 상부에 배치되어, 외부로부터 전원을 공급과 제어를 받을수 있는 커넥터 연결부와 상기 본체의 하부에 형성되어, 야간에 촬영의 용이함과 위치를 표시할수 있도록 하기 위한 발광부와 상기 본체에 배치되어 이더넷(Ethernet) 통신방식을 적용하며, 상기 본체의 위치를 추적하기 위해, 외부와의 무선통신을 수행하는 통신부를 포함하는 것을 특징으로 한다.
상품 상세설명

상품문의
교환/반품



