

특허(전기전자)
전술차량 승무원실의 자동 소화시스템
₩ 5,000,000
₩ 7,500,000
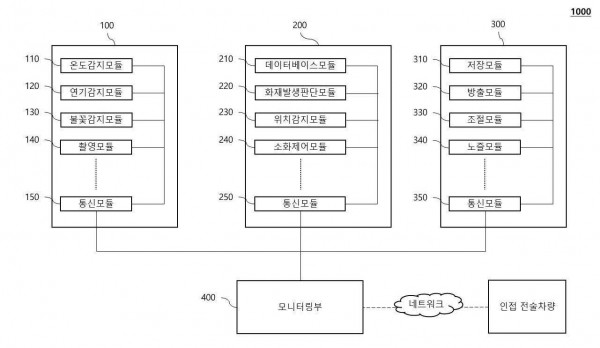
본 개시의 실시예에 따른 전술차량 승무원실의 자동 소화시스템은, 상기의 과제를 해결하기 위한 본 개시의 실시예에 따른 전술차량 승무원실의 자동 소화시스템은, 소정의 위치에 설치되어 전술차량 승무원실의 화재발생을 감지하기 위한 신호를 센싱하는 화재감지부(100); 상기 화재감지부(100)의 데이터를 바탕으로 전술차량 승무원실의 화재발생 여부를 판단하는 제어부(200); 상기 제어부(200)의 명령을 받아 전술차량 승무원실의 화재발생 시 소화를 담당하는 소화부(300); 및 상기 화재감지부(100), 상기 제어부(200), 상기 소화부(300)와 연결되어 데이터를 주고받으며 전술차량 승무원실의 상태를 모니터링할 수 있는 모니터링부(400); 를 포함하고, 상기 소화부(300)는 분사용 소화 약제가 저장되는 저장모듈(310)과, 상기 저장모듈(310)에 결합되며 전기적 신호에 의해 상기 저장모듈(310)에 저장된 소화 약제를 방출시키고, 상기 방출되는 소화 약제의 유량을 감지하는 방출모듈(320)과, 상기 방출모듈(320)에 결합되며 상기 방출되는 소화 약제의 유량에 기초하여 외부로 분사되는 소화 약제의 분사 압력을 조절하는 조절모듈(330)과, 상기 조절모듈(330)에 교체가능하도록 결합되며 복수의 분사 구멍이 형성되어 상기 소화 약제를 상기 분사 구멍을 통해 외부로 분출시키는 노즐모듈(340)을 포함하고, 상기 모니터링부(400)는 전술차량 승무원실의 화재발생 시 전술차량의 현재 위치에 대한 데이터를 수집하고, 화재가 발생한 전술차량에 인접한 또 다른 전술차량에 화재가 발생한 전술차량의 현재 위치 및 화재발생 사실에 대한 알림을 자동으로 제공하는 것을 특징으로 하여 구성될 수 있다.
제어계측용 범용 제어기
₩ 5,000,000
₩ 7,500,000
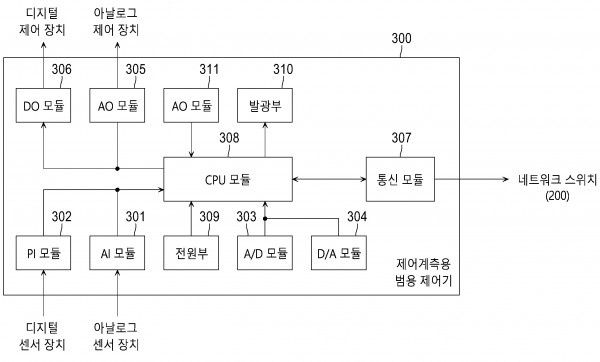
실시예는 제어계측용 범용 제어기에 관한 것이다. 구체적으로, 이러한 제어기는 관리 대상의 상태를 확인할 경우에, 다양한 유형의 아날로그와 디지털 센서 장치에서 통합적으로 상태 데이터를 수집하여 계측한다. 또한, 이에 더하여 이렇게 계측이 완료된 경우에는, 다양한 유형의 아날로그와 디지털 제어 장치에 대해서 계측결과에 따른 제어를 통합적으로 수행한다. 추가적으로, 각각의 제어 장치별로 다수의 상이한 제어 유형과, 각각의 센서 장치별로 다수의 상이한 데이터 유형별로 대응하는 신호인터페이스 정보를 미리 등록해서, 각각의 장치별 신호인터페이스 정보로 I/O를 통합적으로 처리한다. 그리고, 이때 다수의 상이한 계측서비스별로 예를 들어, 압력 또는 온도의 물리량을 계측하는 서비스나, 전기량 계측서비스 등으로 다양한 센서 장치와의 신호인터페이스를 스위칭하므로, 일종의 네트워크 방식으로 I/O를 다원화한다. 또한, 이렇게 I/O가 다원화될 경우에는, 다수의 상이한 제어 장치와 센서 장치별로 신호인터페이스 정보를 매핑한 I/O포트 테이블로부터 신호인터페이스 정보를 추출하므로, 범용으로 제어와 계측을 통합적으로 처리하는 것을 특징으로 한다. 따라서, 이를 통해 관리 대상의 상태를 계측할 경우에, 다양한 유형의 관리 대상상태를 통합적으로 계측하므로, 여러 관리 대상의 장치와 환경 등에서 전체적으로 계측을 수행한다. 그리고, 이렇게 계측결과가 획득된 경우에는, 자체적으로 다양한 유형을 지닌 제어 장치의 동작을 통합적으로 직접 제어한다. 또한, 이에 더하여 원격지 또는 주변의 관리자 장치에 계측결과도 제공함으로써, 이를 통해 중앙 관제센터에서 통합적으로 관리 대상을 유지 보수한다.

무인 수중청소로봇
₩ 5,000,000
₩ 7,500,000
본 발명은 무인 수중청소로봇에 있어서, 디스크 형상으로 이루어지며 회전축선을 따라 서로 이격되도록 배치된 한 쌍의 로봇본체; 상기 한 쌍의 로봇본체 사이에 배치되며, 회전축선을 따라 상기 로봇본체의 중앙영역에 배치되는 펌프부; 상기 펌프부와 연결되며, 상기 한 쌍의 로봇본체 사이에 상기 로봇본체의 외주면을 따라 설치되는 복수 개의 흡입부; 상기 펌프부의 둘레를 따라 상기 펌프부 및 상기 흡입부 사이에 설치되어 상기 로봇본체의 피칭운동 및 롤링운동이 가능하도록 형성된 복수 개의 구동부; 및 상기 펌프부 및 상기 구동부의 구동을 제어하는 제어부;를 포함하는 것을 기술적 요지로 한다. 이에 의해 작업자가 직접 수중으로 들어가지 않고도 수중청소로봇의 피칭운동 및 롤링운동을 자유롭게 컨트롤하여 수중청소로봇을 통해 선체의 이물질을 제거할 수 있으며, 수중청소로봇의 부품 최소화를 통해 가볍고 작은 사이즈로 형성하여 경제성이 증가될 수 있다.
수생물 그림을 삽입가능한 디지털 아쿠아리움
₩ 5,000,000
₩ 7,500,000
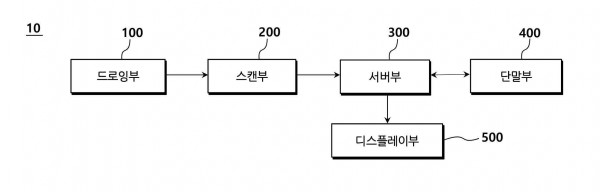
본 발명은 수생물 그림을 삽입가능한 디지털 아쿠아리움에 있어서, 수생동물 또는 수생식물을 포함하는 수생물의 그림을 그리고 색칠하여 수생물 그림을 형성하는 드로잉부; 상기 드로잉부를 통해 형성된 상기 수생물 그림을 스캔하여 전송하는 스캔부; 상기 스캔부로부터 상기 수생물 그림을 전송받아 저장하는 서버부; 상기 서버부를 통해 상기 수생물 그림을 전송받아 상기 수생물 그림의 상태 및 상기 수생물 그림과 함께 표시되는 아쿠아리움 배경의 상태를 조절하고, 상기 상태 조절된 수생물 그림 및 아쿠아리움 배경을 상기 서버부에 재전송하는 단말부; 상기 서버부를 통해 전송받은 상기 상태 조절된 수생물 그림 및 아쿠아리움 배경을 표시하는 디스플레이부;를 포함하는 것을 기술적 요지로 한다. 이에 의해 직접 그리고 색칠한 수생물 그림을 스캔하여 디지털 아쿠아리움에 삽입하고, 아쿠아리움 속 수생물 그림을 감상할 수 있다. 또한 아쿠아리움 속 수생물을 직접 그림으로써 아쿠아리움에 대한 애정을 느낄 수 있으며, 수생물의 감상을 통해 심리적으로 안정을 느끼는 효과를 얻을 수 있다.
항해 시뮬레이션 제공시스템 및 방법
₩ 5,000,000
₩ 7,500,000
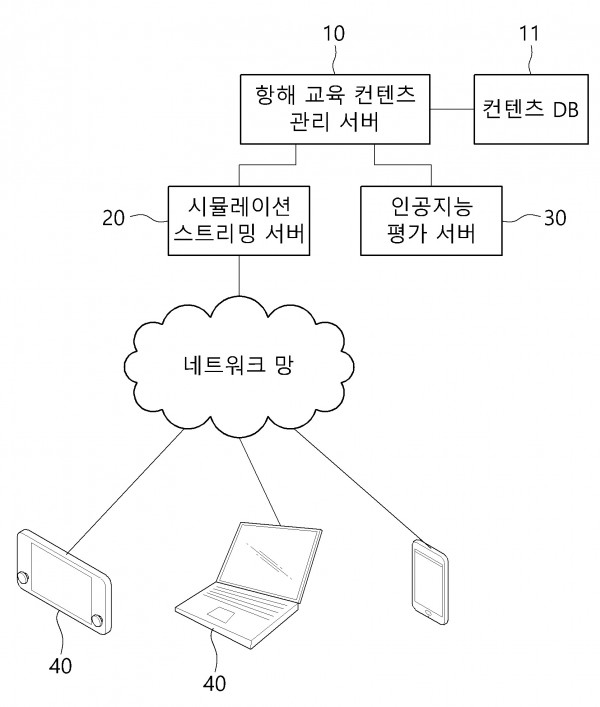
본 발명은 항해 시뮬레이션 제공 시스템 및 방법에 관한 것으로, 항해 교육 컨텐츠를 생성 및 저장하는 항해 교육 컨텐츠 관리서버와, 네트워크망을 통해 사용자기기에 사용자의 조종 능력에 부합하는 난이도의 항해 시뮬레이션 컨텐츠를 스트리밍 방식으로 제공하는 시뮬레이션 스트리밍 서버와, 상기 사용자기기의 조작 상태를 입력함수로 하여 임무 수행의 적합도를 평가하여, 이후 사용자의 조종 능력 수준에 부합하는 난이도의 항해 시뮬레이션 컨텐츠를 자동 매칭하는 인공지능 평가서버를 포함한다.
가상현실 기반의 투약간호 자율실습 장치
₩ 5,000,000
₩ 7,500,000
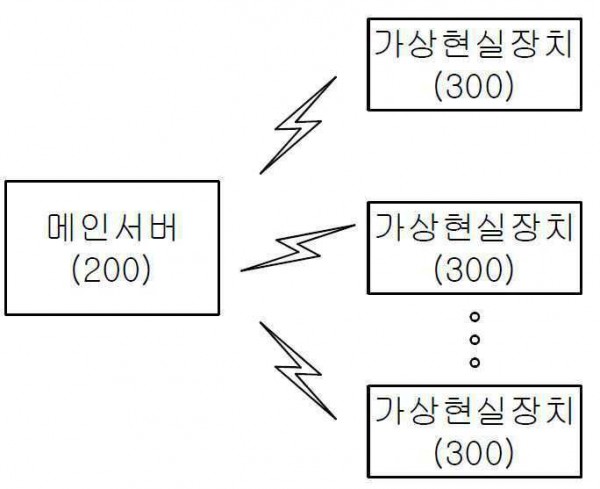
본 발명에 의한 가상현실 기반의 투약간호 자율실습 장치(100)는 메인 서버(200) 및 다수의 가상현실 장치(300)로 구성되고, 상기 가상현실 장치(300)는 상기 가상현실 장치(300) 및 메인 서버(200)가 서로 통신하기 위한 통신 모듈(310), 상기 메인 서버(200)로부터 전송받은 초기 화면(400), 각각의 처방 정보에 대한 투약간호 실습화면(500)들 및 정답지들이 저장되는 메모리부(320), 상기 초기 화면(400), 상기 초기 화면(400)에서 선택된 처방 정보에 맞는 투약간호 실습화면(500)을 출력부(350)를 통해 순서대로 표시하는 제어 모듈(330), 상기 초기 화면(400)에서 사용자에 의해 선택된 처방 정보를 수신하고, 상기 초기 화면(400)에 해당하는 투약간호 실습화면(500)에 상기 사용자에 의해 입력된 사용자 입력 데이터를 수신하는 사용자 입력부(340) 및 상기 초기 화면(400), 상기 초기 화면(400)에서 선택된 처방 정보에 해당하는 투약간호 실습화면(500)을 출력하는 출력부(350)를 포함하는 것을 특징으로 한다.
컨테이너팜용 지능형 원격 모니터링 시스템
₩ 5,000,000
₩ 7,500,000
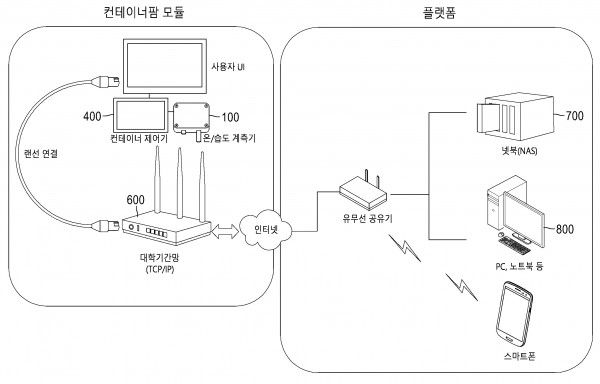
실시예는 컨테이너팜용 지능형 원격 모니터링 시스템에 관한 것이다. 구체적으로, 이러한 원격 모니터링 시스템은 컨테이너팜용 지능형 원격 모니터링 시스템은 컨테이너 내부에서 작물을 재배할 경우, 원격으로 컨테이너의 내부 상태를 제어할 수 있도록 원격제어가 가능한 TCP/IP 기반의 원격제어기를 제공한다. 이러한 경우, 상기 원격 모니터링 시스템은 컨테이너 내부에 설치된 센서(온/습도와, CO2 등등)를 통하여 내부 상태를 계측한다. 이에 더하여, 컨테이너 외부에 설치된 공조기를 제어하여 내부 상태를 제어한다. 그리고, 또한 CCD 카메라 기반의 원격 모니터링시스템을 구축하여 컨테이너의 내부 상태를 녹화/재생 할 수 있는 원격관리 시스템도 제공한다. 또한, 추가적으로 이때 플랫폼 기반으로 원격에서 복수개의 컨테이너팜 제어기를 제어할 수 있도록 한다. 따라서, 이를 통해 컨테이너에서 작물이 재배될 경우, 이러한 지능형 원격 모니터링 구조로부터 컨테이너 내의 작물을 잘 자라게 하는 환경을 만듦으로써, 양질의 컨테이너팜 작물을 제공하는 등의 효과가 있다.
수중드론을 이용한 해저 영상분석시스템 및 영상분석방법
₩ 5,000,000
₩ 7,500,000
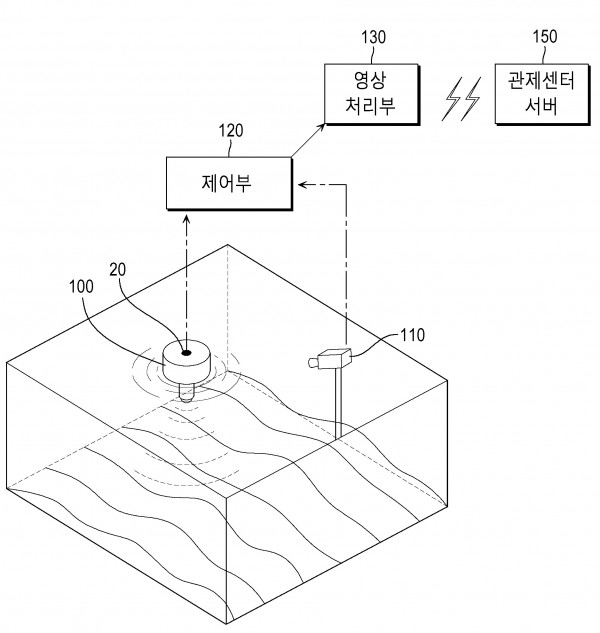
본 발명은 수중드론을 이용한 해저 영상분석시스템과 영상분석방법에 관한 것이다. 본 발명은 가볍고 내식성을 갖는 소재로 형성된 본체와, 상기 본체에 형성되어 본체에 인접한 주변환경을 촬영하고, 촬영된 영상정보를 데이터화하하며, 수집되는 데이터들을 외부로 송신하는 송신모듈이 형성된 촬영장치와, 상기 본체에 형성되어 상기 본체를 수중 내 상하좌우 방향으로 이동이 가능한 동력수단과, 상기 본체에 형성되어 상기 동력수단의 동작을 제어하는 제어 모듈과 상기 본체의 방향 위치를 검출하는 위치검출 모듈을 포함하는 제어수단으로 이루어지는 수중드론과 상기 수중드론의 현재 위치를 식별하기 위한 표면에 LED가 형성되어 있는 발열체와 상기 송신모듈로부터 상기 데이터를 수신하여 디스플레이하기 적합한 출력영상으로 변환시키는 영상처리장치와 상기 영상처리장치로부터 영상의 획득을 제어하고 정확한 영상을 획득하도록 영상의 객체분석 및 필터링을 제어하는 제어부와 상기 제어부에 의한 제어를 통해 획득한 영상을 분석하여, 영상 객체분석 및 필터링을 수행하는 영상처리부와 상기 영상처리부에서 촬영된 영상을 입력받아 통신모듈을 통하여 실시간 전송하고, 전송된 상기 영상을 관리하는 관제센터 서버를 포함하는 것을 특징으로 하는 것이다.

모니터용 다중 디스플레이케이스
₩ 5,000,000
₩ 7,500,000
본 발명은 모니터용 다중 디스플레이케이스에 관한 것으로 구체적으로는 PC, 노트북 등의 모니터에 탈착가능하도록 함으로써 보조디스플레이와 함께 사용할 수 있도록 하는 모니터용 다중 디스플레이케이스에 관한 것이다. 본 발명은 노트북,PC 등의 모니터에 본 발명의 다중디스플레이케이스를 체결함으로써 더 넓은 화면을 사용할 수 있도록 하는 것이며, 여러 사람들과 함께 모니터를 볼 경우 다양한 방향에서 모니터 화면을 공유할 수 있도록 하는 효과가 있다.
스윙 암과 통합된 패드 프로파일 측정 시스템
₩ 5,000,000
₩ 7,500,000
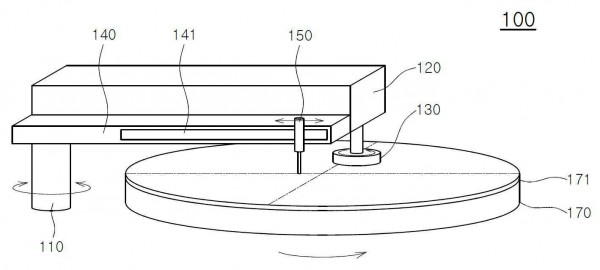
본 발명에 의한 스윙 암과 통합된 패드 프로파일 측정 시스템은 상면에 연마 패드(171)가 배치된 정반(170)의 일측에 회전 가능하게 설치된 본체(110), 일측이 상기 본체(110)의 상부에 회전 가능하게 설치된 스윙 암(120), 상기 스윙 암(120)의 타측 하부에 회전 및 직진 운동이 가능하게 설치되어, 상기 연마 패드(171)를 컨디셔닝하는 컨디셔너(130), 상기 스윙 암(120)의 전면 하부에 설치되고, 전면에는 가이드부(141)가 함몰 형성된 이송부(140), 상기 가이드부(141)의 일단에서 타단까지 이동 가능하게 설치되어, 상기 연마 패드(171)의 두께 프로파일을 측정하는 센서부(150), 상기 컨디셔너(130)의 상부에 구비되어, 상기 컨디셔너(130)를 중력 방향으로 가압하는 가압부(155), 상기 가압부(155)의 일측에 설치되어, 상기 가압부(155)에 의해 상기 컨디셔너(130)에 가해지는 실제 압력값을 측정하는 압력 센서(156), 상기 연마 패드(171)의 상면에 설치되어, 상기 스윙 암(120)의 실제 처짐값을 측정하는 처짐 측정 센서(157) 및 상기 처짐 측정 센서(157)에 의해 측정된 상기 스윙 암(120)의 실제 처짐 데이터를 이용하여 상기 가압부(155)의 실제 압력값을 조절하는 컨트롤 모듈(160)을 포함하는 것을 특징으로 한다.
공기주입식 서프보드
₩ 5,000,000
₩ 7,500,000
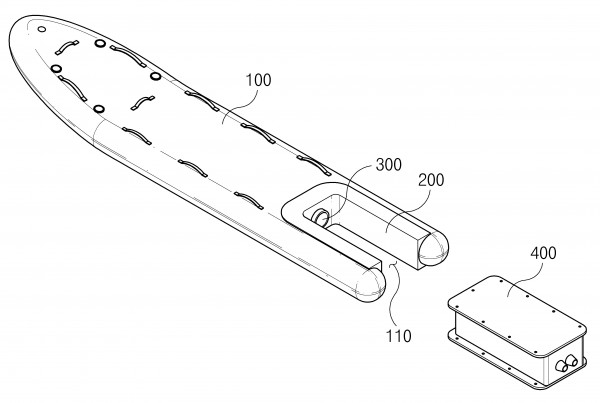
본 발명에 의한 공기주입식 서프보드는, 내부공간을 구비하는 보드 형상을 갖도록 연성시트로 제작되며, 길이방향 일측에 오목한 형상의 인입부를 구비하는 보드몸체; 상기 보드몸체의 외측면 중 상기 인입부가 형성된 부위를 덮도록 결합되는 보드프레임; 상기 보드프레임의 중단을 관통하여 상기 보드몸체의 내부공간과 연통되는 체결관; 상기 인입부에 끼워맞춤 방식으로 삽입 가능한 형상으로 형성되는 파워팩몸체와, 상기 파워팩몸체가 상기 인입부에 삽입되었을 때 상기 체결관에 삽입되는 공기주입관과, 상기 파워팩몸체 내부에 장착되어 상기 공기주입관으로 고압의 압축공기를 공급하는 공기펌프와, 상기 파워팩몸체 내부에 장착되어 상기 공기펌프로 전원을 공급하는 배터리를 구비하는 전동파워팩;을 포함하여 구성된다. 본 발명에 의한 공기주입식 서프보드는, 사용자의 노동력 없이도 공기 주입이 자동으로 이루어질 수 있어 사용이 편리하고, 사전에 설정된 양만큼만 공기가 주입되어 기준치 이상의 부력을 유지하면서 파손의 우려가 발생하지 아니한다는 장점이 있다. □ 논문 등 출처기재(謝辭) 표기 ○ 국문 ☞ 본 성과물은 부산광역시의 대학혁신연구단지조성사업 중 “동명대학교 대학혁신연구단지조성사업” 지원으로 수행되었음 ○ 영문 ☞ This work was supported by a grant from Tongmyong University Innovated University Research Park(I-URP) funded by Busan Metropolitan City, Republic of Korea.

반도체 공정의 화학기계적 연마(CMP)를 위한 히드록시 라디칼과 용존산소량 제어를 통한 고능률 하이브리드 연마 시스템
₩ 5,000,000
₩ 7,500,000
본 발명에 따른 고능률 하이브리드 연마 장치는 과산화수소가 포함된 슬러리를 수용하는 탱크(100); 상기 슬러리의 용존 산소량(DO)을 측정하는 DO 측정부(200); 상기 슬러리에 자외선을 조사하여 히드록시 라디칼을 생성하는 제1 UV 조사부(300); 상기 슬러리에 나노버블을 공급하여 용존 산소량을 제어하는 나노버블 공급부(400); 상기 탱크(100)와 연통되어 상기 슬러리를 전해노즐부(600)로 이송하는 펌프부(500); 상기 펌프부(500)에서 이송된 슬러리를 전기분해하여 이온화시키고, 난삭재 연마부(800)으로 슬러리를 토출하는 전해노즐부(600); 상기 난삭재 연마부(800)의 상부 일측에 구비되어, 상기 전해노즐부(600)에서 토출된 슬러리에 자외선을 조사하는 제2 UV 조사부(700); 상부에 연마 패드가 부착되고, 회전 가능한 플레이튼부(810);와, 상기 플레이튼부(810) 상에서 연마할 난삭재를 개재하여 접하는 폴리싱 헤드부(820);를 구비하는 난삭재 연마부(800);를 포함하여 이루어지고, 히드록시 라디칼 및 용존 산소의 제어를 통해 난삭재의 화학기계적연마(CMP)에 적용하는 것을 특징으로 한다.

반도체 공정의 화학기계적 연마(CMP)를 위한 연마 입자 분산성 향상을 통한 시너지 효과 극대화와 SiC 및 GaN 기판 가공 방법 및 시스템
₩ 5,000,000
₩ 7,500,000
본 발명에 따른 반도체 공정의 화학기계적 연마(CMP)를 위한 연마 입자의 분산성 향상을 통한 SiC 및 GaN 기판 가공 시스템은, 과산화수소가 포함된 슬러리를 수용하는 탱크(100); 상기 슬러리의 용존 산소량(DO)을 측정하는 DO 측정부(200); 상기 슬러리에 자외선을 조사하여 히드록시 라디칼을 생성하는 제1 UV 조사부(300); 상기 슬러리에 나노버블을 공급하여 용존 산소량을 제어하는 나노버블 공급부(400); 상기 탱크(100)와 연통되어 상기 슬러리를 전해노즐부(600)로 이송하는 펌프부(500); 상기 펌프부(500)에서 이송된 슬러리를 전기분해하여 이온화시키고, SiC 및 GaN 기판 연마부(800)으로 슬러리를 토출하는 전해노즐부(600); 상기 전해노즐부(600)에 전원을 인가하는 전원공급부(650); 상기 SiC 및 GaN 기판 연마부(800)의 상부 일측에 구비되어, 상기 전해노즐부(600)에서 토출된 슬러리에 자외선을 조사하는 제2 UV 조사부(700); 상부에 연마 패드가 부착되고, 회전 가능한 플레이튼부(810);와, 상기 플레이튼부(810) 상에서 연마할 SiC 및 GaN 기판을 개재하여 접하는 폴리싱 헤드부(820);를 구비하는 SiC 및 GaN 기판 연마부(800);를 포함하며, 상기 슬러리는 다이아몬드(diamond), 실리카(SiO2), 알루미나(Al2O3) 및 세리아(CeO2) 중에서 선택되는 하나 이상의 연마 입자를 더 포함하고, 상기 전기분해 시 상기 슬러리에 인가되는 전류 세기는 5 내지 10 A 인 것을 특징으로 한다.
블록체인 기반의 게임 품질 관리 시스템 및 방법
₩ 5,000,000
₩ 7,500,000
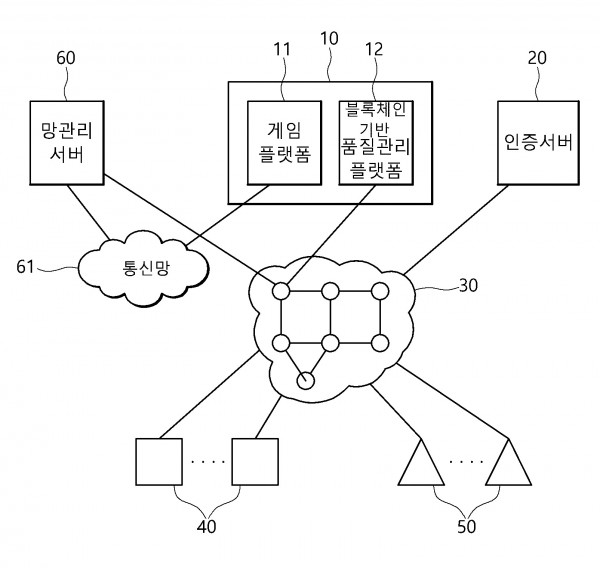
본 발명은 블록체인 기반의 게임 품질 관리 시스템 및 방법에 관한 것으로, 품질관리 원장을 분산 저장함과 아울러 게임의 수행 중 품질관리 원장의 기재와는 다른 이용자 경험이 있는 경우, 상기 품질관리 원장을 수정하여 품질관리 분산원장을 생성하는 풀노드들과, 상기 풀노드들에서 생성된 품질관리 분산원장을 분산 저장하고, 동의 여부를 선택하는 라이트 노드들과, 게임 품질의 테스트 결과를 상기 품질관리 원장으로 생성함과 아울러 상기 품질관리 분산원장에 대한 동의 비율에 따라 품질 개선 우선 순위를 정하여 품질을 개선하는 게임 서비스 서버를 포함할 수 있다.
스마트 시계를 이용한 실내 위치추적 경로 패턴인식 방법
₩ 5,000,000
₩ 7,500,000
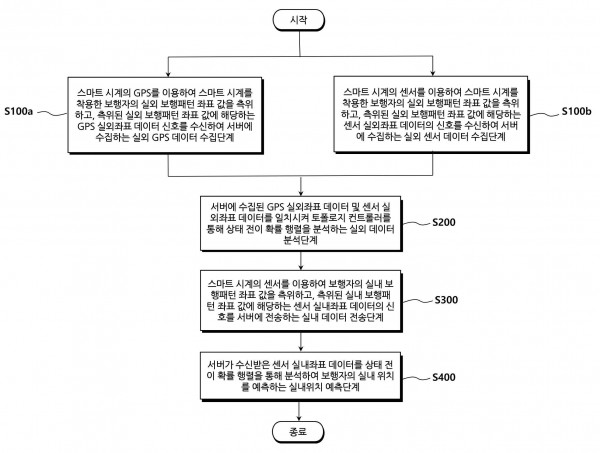
본 발명은 스마트 시계를 이용한 실내 위치추적 경로 패턴인식 방법에 있어서, 스마트 시계의 GPS(global positioning system) 및 센서를 이용하여 상기 스마트 시계를 착용한 보행자의 실외 보행패턴 좌표 값을 측위하고, 상기 측위된 실외 보행패턴 좌표 값에 해당하는 GPS 실외좌표 데이터 및 센서 실외좌표 데이터의 신호를 각각 수신하여 서버에 수집하는 실외 데이터 수집단계; 상기 서버에 수집된 GPS 실외좌표 데이터 및 센서 실외좌표 데이터를 일치시켜 토폴로지 컨트롤러(topology controller)를 통해 상태 전이 확률 행렬(state transition probability matrix)을 분석하는 실외 데이터 분석단계; 상기 스마트 시계의 센서를 이용하여 상기 보행자의 실내 보행패턴 좌표 값을 측위하고, 상기 측위된 실내 보행패턴 좌표 값에 해당하는 센서 실내좌표 데이터의 신호를 서버에 전송하는 실내 데이터 전송단계; 상기 서버가 수신받은 상기 센서 실내좌표 데이터를 상기 상태 전이 확률 행렬을 통해 분석하여 상기 보행자의 실내 위치를 예측하는 실내위치 예측단계;를 포함하는 것을 기술적 요지로 한다. 이에 의해 GPS 및 센서를 이용하여 실외 보행패턴 좌표 값을 측위하고 센서를 이용하여 실내 보행패턴 좌표 값을 측위하며, 이러한 실외 보행패턴 좌표 값 및 실내 보행패턴 좌표 값을 비교하여 보행자의 실내위치를 예측가능한 효과가 있다.
