

특허(전기전자)
GPS 신발용 소형 위치정보 송신기 및 이를 적용한 위치관리방법
₩ 5,000,000
₩ 7,500,000
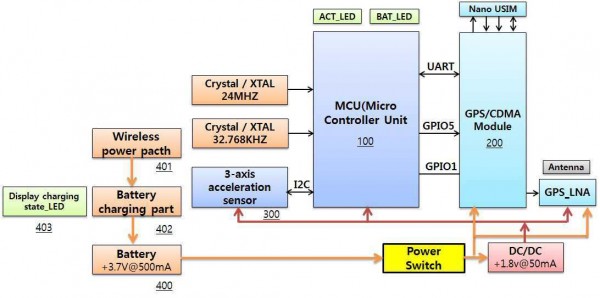
GPS 신발가입자 위치관리시스템에서 사용되는 GPS 신발에 삽입되는 GPS 신발용 소형 위치정보 송신기에 있어서, 마이크로 콘트롤러 유닛(100); GPS 수신기(201) 및 CMDA 모뎀(202)을 포함하는 일체형 모듈(200); 3축 가속도 센서(300) 및 전원공급부(400)를 포함하는 것을 특징으로 하고, GPS 신발에 삽입되는 GPS 신발용 소형 위치정보 송신기를 적용한 위치관리방법에 있어서, GPS 신발에 삽입되는 송신기가 위성에서 위치정보를 수신하면 CDMA 이동통신망과 인터넷을 통해 서버로 송신하여 정보를 저장하는 단계(S100); 관리자가 스마트 폰을 통해 서버로 접근하여 GPS 신발 내의 송신기의 위치를 조회 및 추적하는 단계(S200); 관리자가 송신기로 SMS 제어 신호를 보내고 응답을 받는 과정을 통해 서버의 IP 주소, 서버로의 송신 주기, 전원 스위치 ON/OFF, 배터리 잔류량에 대해 조회하는 단계(S300) 및 관리자가 서버의 IP 주소와 송신기의 위치정보 송신 주기에 대해서는 원하는 값으로 변경하는 단계(S400)를 포함하는 것을 특징으로 한다.
승강기용 도어 인터록에 대한 방폭 테스트 해석방법
₩ 5,000,000
₩ 7,500,000
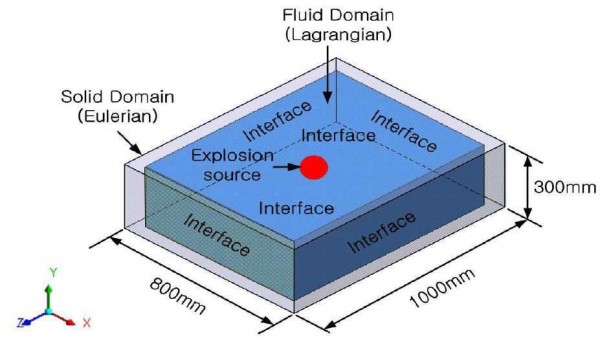
본 개시는 이상에서와 같은 승강기용 도어 인터록에 대한 방폭 테스트 해석방법은, 해양플랜트와 군수산업 등에서 화물운송을 위해 사용되는 특수 승강기의 안전장치인 도어 인터록에 대해서 폭발상황을 가정하여 보호용기의 안정성을 해석적 개시를 통해 고찰하고, 이를 통해 방폭구조(Explosion proof structure)설계에 대한 기초자료로 활용할 수 있는 장점을 갖는다. 본 개시의 실시예에 따른 승강기용 도어 인터록에 대한 방폭 테스트 해석방법은, 승강기용 도어 인터록의 방폭 실험 해석방법에 있어서, 도어 인터록의 보호용기에서 발생한 폭발현상을 점화원에서 폭발에 의한 충격파의 전달을 해석하는 유동영역 해석과 충격파에 의한 영향을 받은 구조물의 구조영역에 대한 해석하는 구조영역 해석으로 수치해석모델을 설정하는 단계와, 상기 수치해석모델 설정단계의 상기 유동영역 해석 및 상기 구조영역 해석에 대한 정밀도를 향상하기 위하여 해석모델에 대한 해석조건을 설정하는 단계와, 상기 유동영역 해석 및 상기 구조영역 해석에 고려될 경계조건을 설정하며, 상기 유동영역 해석 및 상기 구조영역 해석에 따른 결과를 데이터화 하는 경계조건을 설정하는 단계를 포함하여 이루어진다.
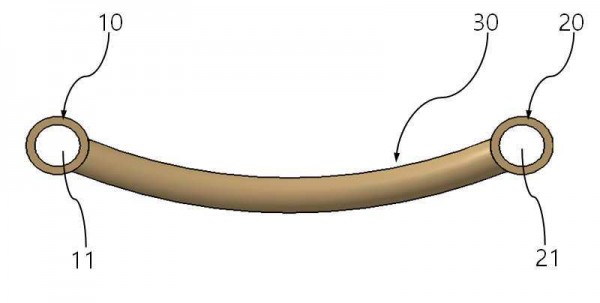
천연잔디패널의 조립 구조
₩ 5,000,000
₩ 7,500,000
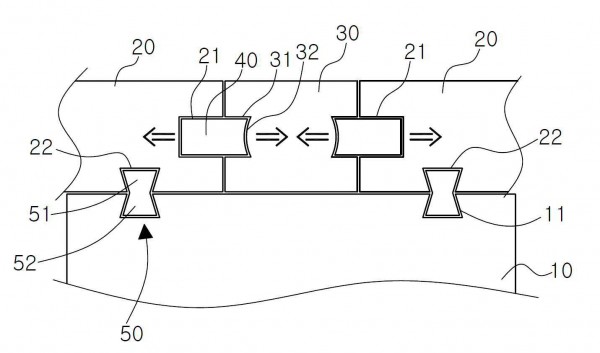
본 발명은 격자 또는 일렬로 배치되는 다수의 받침대(10); 상기 받침대(10)들의 상면에 한 쌍이 서로 대향하게 배치되며, 상기 받침대(10)들의 상면에서 서로 대향하는 한 쌍의 대향면에 각각 베이스홈(21)이 형성되는 다수의 천연잔디패널(20); 상기 받침대(10)들의 상면에 배치된 한 쌍의 천연잔디패널(20) 사이에 개재되며 상기 베이스홈(21)에 대향하는 양단에 각각 한 쌍의 분리홈(31)이 형성되는 다수의 분리벽(30); 및 상기 베이스홈(21)과 분리홈(31)에 삽입되는 다수의 신축부(40);를 포함하는 천연잔디패널의 조립 구조에 관한 것이다.

영상증배관을 이용한 실시간 영상획득시스템 및 이를 이용한 위치오차검증 방법
₩ 5,000,000
₩ 7,500,000
본 발명에 따른 영상증배관을 이용한 실시간 영상획득시스템은 X선 발생장치를 이용하여 X선을 발생시켜 측정하고자 하는 대상을 투사한 후, 나온 영상 신호를 증폭하는 영상증배관을 이용한 실시간 영상획득시스템에 있어서, 납으로 제작되어 방사선을 차폐할 수 있는 하우징; 상기 하우징 내부에 설치되어 X선을 발생시켜 측정하고자 하는 대상을 투사하는 X선 발생장치; 상기 X선 발생장치 및 상기 대상과 일직선으로 설치되어 상기 X선의 투시휘도를 증강시키는 영상증배관 및 상기 하우징 내부에 설치되고 상기 영상증배관과 연결되어, 상기 대상을 투사한 상기 X선에 대한 영상을 획득하는 영상획득 장치를 포함하고, 본 발명에 따른 영상획득시스템을 이용한 위치오차검증 방법은 X선 발생장치, 영상증배관 및 영상획득 장치을 포함하는 영상획득시스템을 이용한 위치오차검증 방법에 있어서, 이미지를 획득하는 단계; 색상 평면 추출 단계; 템플릿(주형)을 설정하는 단계; 영상분석영역을 지정하는 단계; 템플릿영상과 비교영상에 대한 패턴을 매칭하는 단계 및 포지션 에러를 검증하는 단계를 포함한다.
상태 계측 및 세척 가능한 볼 밸브
₩ 5,000,000
₩ 7,500,000
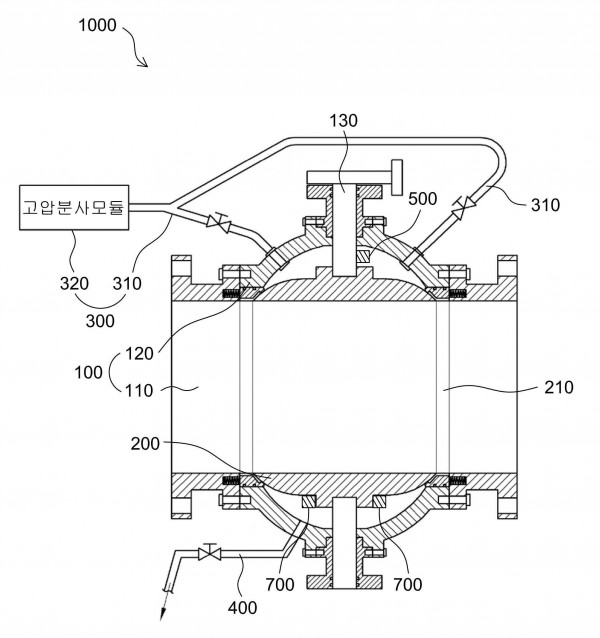
본 발명은 지반에 설치된 볼 밸브의 상태를 원격으로 확인할 수 있으며, 볼 시트와 볼 사이에 이물질을 제거할 수 있는 상태 계측 및 세척 가능한 볼 밸브에 관한 것으로, 내부에 유체 통로를 가지는 볼 시트가 수용되는 밸브 몸체와, 상기 볼 시트에 회전 가능하게 설치되되, 상기 유체 통로에 대응되는 연결 통로가 형성되어 회전에 의해 상기 유체 통로를 개폐시키는 볼과, 상기 밸브 몸체의 상부에 연통되는 주입구와, 상기 주입구의 단부에 설치되어 세정수를 분사하는 고압 분사 모듈을 포함하는 세척부와, 상기 밸브 몸체의 하부에 연통되며, 상기 세척부를 통해 분사된 세정수를 외부로 배출시키는 배출부와, 상기 볼 시트 상에서 상기 볼의 회전 위치를 측정하는 위치 측정부 및 상기 위치 측정부에서 측정한 상기 볼의 위치 정보를 수신하며, 상기 볼이 상기 유체 통로가 개방되도록 유체 통로와 연결 통로가 연통되는 위치할 경우, 상기 고압 분사 모듈에서 세정수를 분사하지 않도록 제어하고, 상기 볼이 상기 유체 통로가 폐쇄되는 위치로 회전될 경우, 상기 고압 분사 모듈에서 세정수를 분사하도록 제어하는 제어부를 포함하는 것을 특징으로 한다.
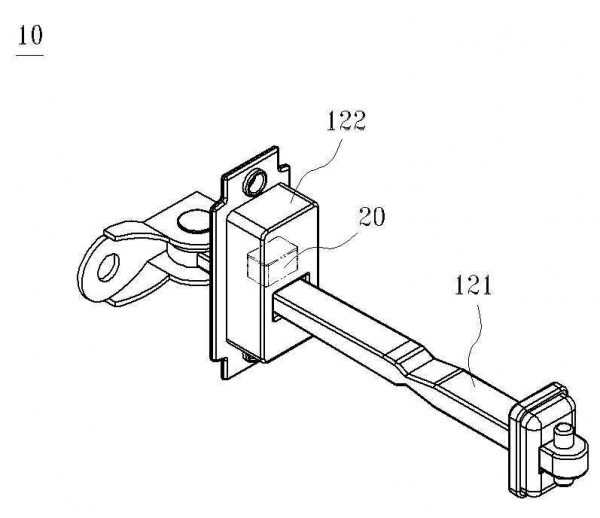
충돌 방지용 차량 도어의 열림 조절장치
₩ 5,000,000
₩ 7,500,000
본 발명은 차량 도어의 개문시에 도어와 차량 외부의 물체가 충돌되는 것을 방지시키기 위한 차량 도어의 여닫힘 조절장치에 관한 것으로서, 보다 상세하면, 도어의 외부에는 도어에 대한 외부물체의 거리를 감지하는 거리감지 센서부재가 장착되고, 차체와 도어를 서로 연결시키는 도어체크에 장착되는 전자석부재는 도어의 열림에 따른 도어체크에 구비된 로드의 슬라이딩 이동 가능성 여부 및 슬라이딩 이동속도를 조절할 수 있도록 구성되며, 도어의 열림시에 도어와 외부물체가 충돌될 정도로 근거리 위치되는 경우에는 거리감지 센서부재가 외부 물체를 감지하여 제어부에 감지신호를 전달하고, 전자석부재는 제어부에서 생성된 자력 생성신호를 전달받아 자력을 생성시킴으로써 상기 로드의 슬라이딩 이동을 제한하거나 슬라이딩 이동속도를 조절하여, 도어와 외부물체 간의 충돌을 방지시킬 수 있는 충돌 방지용 차량 도어의 열림 조절장치에 관한 것이다.

Wi-Fi 환경에서 칼만필터와 입자필터를 혼용한 이동물체 위치추적 방법
₩ 5,000,000
₩ 7,500,000
본 발명에 따른 Wi-Fi 환경에서 칼만필터와 입자필터를 혼용한 이동물체 위치추적 방법은 Wi-Fi 환경을 이용한 컴퓨터 시스템에서 칼만필터와 입자필터를 혼용하여 이동물체의 이동패턴의 특성에 맞게 사용하는 이동물체 위치추적 방법에 있어서, Wi-Fi의 AP로부터 RSSI 신호 값을 수집하는 단계(S100); 상기 이동물체가 임의의 이동경로를 따라 이동 중일 때 각속도를 측정하는 단계(S200); 상기 이동물체가 임의의 이동경로를 따라 이동 중일 때 미리 설정한 임계치와 비교하여 직선 또는 곡선구간을 결정하는 단계(S300) 및 이동물체의 이동방향에 대한 패턴을 분석하여 이에 적합한 필터를 적용하는 단계(S400)를 포함하는 것을 특징으로 한다.
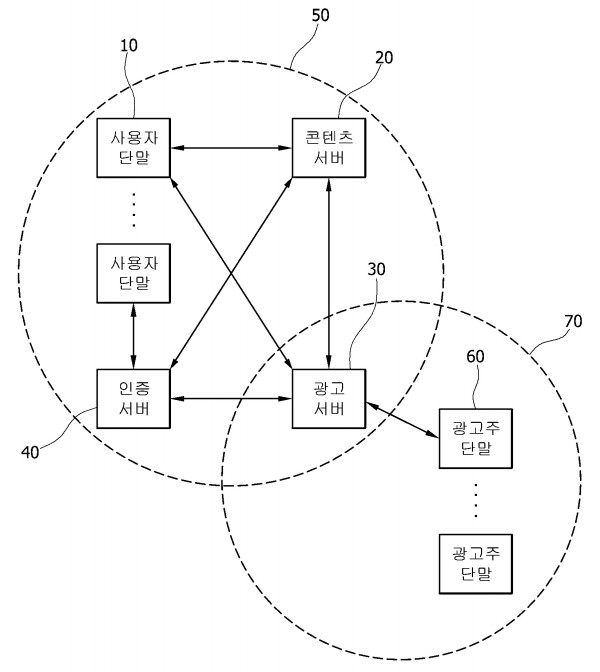
하이브리드 블록체인을 이용한 가상현실 개인 맞춤형 간접광고 제공 방법
₩ 5,000,000
₩ 7,500,000
본 발명은 하이브리드 블록체인을 이용한 가상현실 개인 맞춤형 간접광고 제공 방법에 관한 것으로, 광고를 표시할 수 있는 가상현실 콘텐츠를 제공하는 콘텐츠서버와, 상기 콘텐츠서버에 광고를 제공하여, 상기 콘텐츠서버가 제공하는 콘텐츠의 지정된 위치에 광고를 표시하는 광고서버와, 상기 콘텐츠서버에서 제공하는 콘텐츠를 사용하며, 표시된 상기 광고를 시청 확인하는 사용자단말을 포함하되, 상기 콘텐츠서버, 상기 광고서버 및 상기 사용자단말은 퍼블릭 합의 네트워크를 이루는 노드가 되고, 상기 사용자단말의 광고 시청 확인 수는 상기 퍼블릭 합의 네트워크 내에서 합의 및 분산 저장할 수 있다.
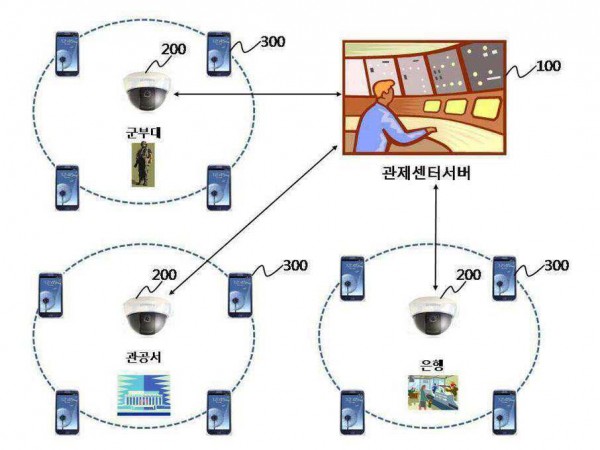
모바일 기기를 이용한 공조 시스템 제어방법
₩ 5,000,000
₩ 7,500,000
본 발명은 모바일 기기를 이용한 상황 인지 이벤트 공조 통보시스템 제어 방법에 관한 것으로, 이벤트 발생 현장의 설정 범위 내에 위치한 관련자의 모바일 기기에 알림 신호를 전송하고, 관련자가 선택한 버튼에 따라 다른 관련자에게 출동 정지 신호를 보내거나, 추가인력을 요청하는 모바일 기기를 이용한 상황 인지 이벤트 공조 통보시스템 제어 방법에 관한 것이다.
소스코드 가공 방식의 웹브라우저용 매크로 시스템
₩ 5,000,000
₩ 7,500,000
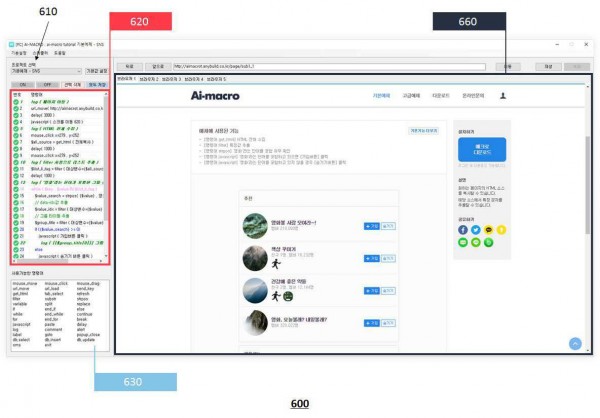
본 발명은 웹브라우저에서 출력되는 화면의 소스코드를 가공하여 매크로를 제작하고 실행시키는 시스템에 관한 것이다. 본 발명은 다음과 같은 효과를 발휘한다. 즉, 웹브라우저 상에 구현되는 웹페이지의 소스코드를 가공하여 웹브라우징에 특화된 매크로를 제작 및 수정이 가능해진다. 특히 실행 과정을 실시간으로 확인할 수 있어 매크로 제작시 수정 작업이 간편해지고, 로그인, 데이터 검색, 댓글 작성 등 웹사이트 상에서 이루어지는 작업을 매크로화 하기 용이한 기존 명령어가 구비되어 사용성이 높으며, 언어가 다를 경우 사용자가 직접 소스코드를 추가하는 방식으로 매크로를 제작할 수 있어 다양한 웹페이지에서 호환이 가능한 장점이 있다.
배기열을 이용한 액화천연가스 연소장치
₩ 5,000,000
₩ 7,500,000
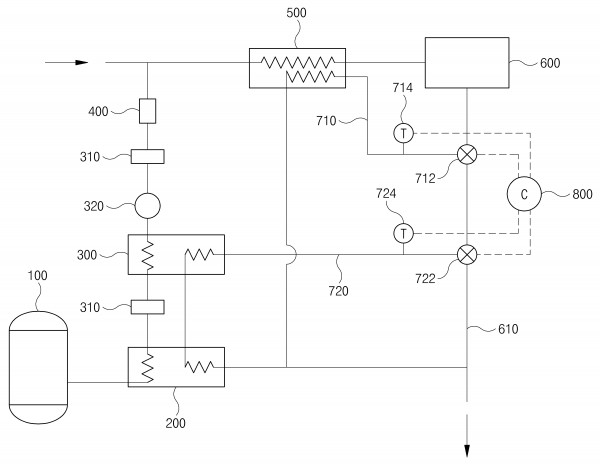
본 발명에 의한 배기열을 이용한 액화천연가스 연소장치는, 액화천연가스가 저장된 LNG 탱크; 상기 LNG 탱크에서 제공된 액화천연가스를 기화시키는 기화부; 상기 기화부에서 기화된 액화천연가스를 가열시키는 연료가열부; 상기 연료가열부에서 가열된 연료를 분사하여 공기와 혼합시킴으로써 혼합기를 생성하는 연료분사장치; 상기 연료분사장치에서 생성된 혼합기를 가열하는 혼합기가열부; 상기 혼합기가열부에 의해 가열된 혼합기를 연소시켜 동력을 발생시키며, 배출유로를 통해 배기가스를 배출시키는 LNG 엔진; 상기 배출유로를 통해 배출되는 배기가스의 일부를 상기 혼합기가열부로 유입시키는 제1 회송유로; 상기 배출유로를 통해 배출되는 배기가스의 일부를 상기 연료가열부를 거쳐 상기 기화기로 유입시키는 제2 회송유로;를 포함하여 구성된다.

미세먼지센서를 포함하는 멀티 융복합 센서기반 듀얼 모드 웨어러블 디바이스 동작방법
₩ 5,000,000
₩ 7,500,000
본 발명은 헬스케어용 디스플레이장치(200)와 연동하는 연동 프로토콜을 제공하는 멀티 융복합 센서기반 듀얼 모드 웨어러블 디바이스(100)의 멀티 융복합 센서기반 듀얼 모드 웨어러블 디바이스 동작방법에 있어서, 상기 멀티 융복합 센서기반 듀얼 모드 웨어러블 디바이스(100)는 사용자의 발목에 착용할 수 있는 착용부(120)와; 상기 착용부에 착탈식으로 결합되는 몸체(110); 로 이루어지는 것이며, 상기 몸체(110)에는 전력관리부(Power management)와; 예비센서(Pressure Sensor)와; 광학 광전용적맥파 센서(Optical PPG Sensor)와; 온도센서(Temperature Sensor)와; 모션센서(Motion Sensor)와; 메인제어부(MCU)와; LED부와; 저전력 블루투스(BLE, Bluetooth Low Energy) 4.0과; USB포트와; 리튬폴리머 배터리(Lithium polymer battery)와; 배터리충전기(Battery Charger); 가 내장되는 것으로, 본 발명 멀티 융복합 센서기반 듀얼 모드 웨어러블 디바이스 동작방법은 헬스케어용 디스플레이장치와 연동하는 연동 프로토콜을 제공하고, 상기 연동 프로토콜은 통신 최적거리, 최대 데이터 용량을 분석하며, 채널 상태에 따라 주파수를 호핑하며, 반복 시험을 통해 버그를 수정하며 실내에 적합한 라우팅 센서를 적용하며, 저전력이며 휴대 및 부착이 편리하다는 현저한 효과가 있다.
금속 벽면 주행 로봇
₩ 5,000,000
₩ 7,500,000
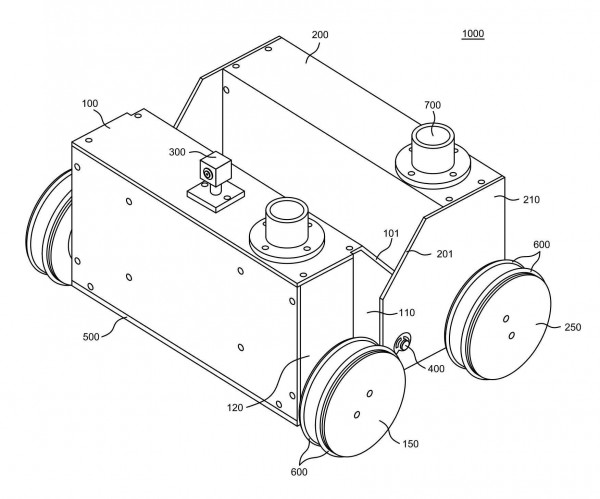
본 발명은 수직 혹은 경사진 상태의 불규칙한 표면 형상과 무관하게 배치된 철 구조물이나 굴곡 형성된 곡면부재의 표면을 자유로이 이동할 수 있는 금속 벽면 주행 로봇에 관한 것으로, 전방 본체와, 상기 전방 본체의 양측에 설치되되, 자성체로 이루어지며 상기 전방 본체의 전면보다 돌출되는 외경을 가지는 전방 바퀴와, 상기 전방 본체의 후단부에 결합되는 후방 본체와, 상기 후방 본체의 양측에 설치되되, 자성체로 이루어지며 상기 후방 본체의 후면보다 돌출되는 외경을 가지는 후방 바퀴와, 상기 전방 본체 또는 후방 본체의 상부에 설치되는 촬영부와, 상기 전방 본체의 후단부와 상기 후방 본체의 전단부에 회전 가능하게 결합되는 연결축 및 상기 연결축에 회전 가능하게 설치되는 중앙 바퀴를 포함하는 것을 특징으로 한다.
수중 원격 무인시스템
₩ 5,000,000
₩ 7,500,000
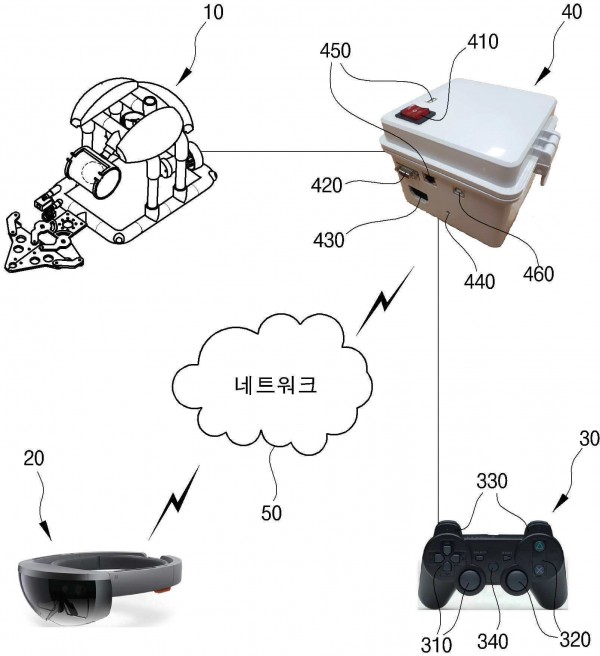
본 발명은 ROV(Remotely Operated Vehicle) 시스템에 관한 것으로, 사용자 단말기로 수중에서 수중 원격 무인장치의 움직임을 조종하고, 사용자의 머리에 착용된 영상출력장치에서 사용자의 머리 움직임을 감지하고, 머리 움직임에 대응하는 방향의 수중영상정보를 영상출력장치에서 제공하는 수중 원격 무인시스템에 관한 것이다. 상기 수중 원격 무인시스템은, 수중을 촬상하여 수중영상정보를 생성하는 카메라부를 구비하고 상기 수중에서 구동되는 수중 원격 무인장치; 사용자의 머리에 착용되어 사용자의 머리 움직임을 감지하고, 상기 수중영상정보를 디스플레이하는 영상출력장치; 상기 수중 원격 무인장치의 움직임을 조종하는 휴대 가능한 사용자 단말기; 및 상기 사용자 단말기 및 상기 영상출력장치의 제어신호에 따라 상기 수중 원격 무인장치의 움직임을 제어하는 제어장치;를 포함하는 것을 특징으로 한다.






