

특허(전기전자)
상품 정보
상품 기본설명
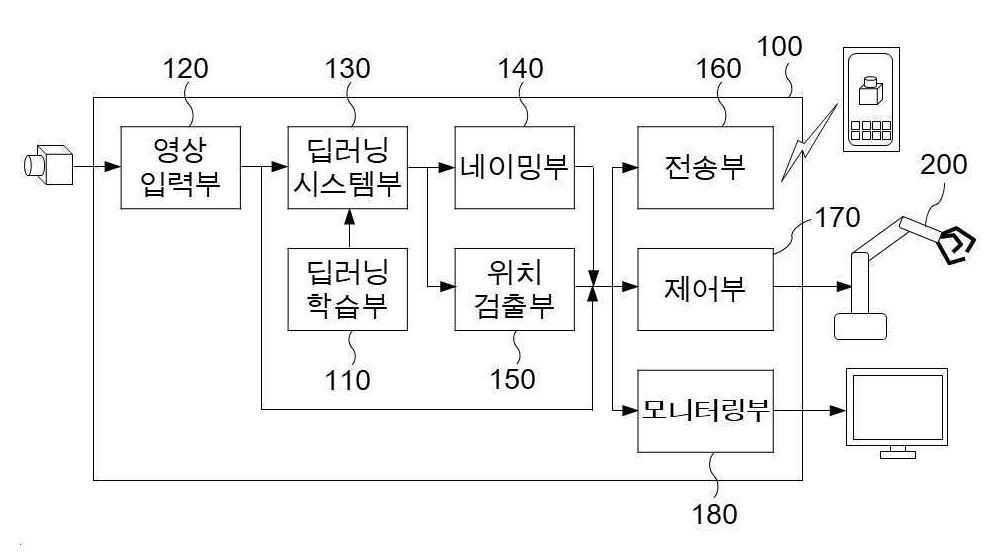
본 발명은 RGB 카메라 및 RGB-D 카메라에 의해 촬영된 복수의 비정형 재활용품의 영상으로부터 데이터세트를 생성하고, 상기 데이터세트를 이용하여 Mask R-CNN을 학습시켜 학습 모델 Mask R-CNN 및 파라미터를 생성시키는 딥러닝 학습부(110), 상기 RGB 카메라 및 RGB-D 카메라에 의해 촬영된 비정형 재활용품의 영상으로부터 색상 데이터 및 깊이 데이터를 포함하는 영상 데이터를 획득하는 영상 입력부(120), 상기 학습 모델 Mask R-CNN 및 파라미터를 이용하여 상기 색상 데이터로부터 인스턴스 영역 분할 기법을 이용하여 배경과 구분되는 마스크를 검출하고, 상기 비정형 재활용품을 종류별로 구분하는 딥러닝 시스템부(130), 상기 딥러닝 시스템부(130)에 의해 종류별로 구분된 상기 마스크에 대해 이름을 부여하여 레이블링(labeling) 데이터를 생성하는 네이밍부(140), 상기 딥러닝 시스템부(130)에 의해 검출된 상기 마스크 및 상기 영상 입력부(120)에 의해 획득된 깊이 데이터로부터 장축, 단축 및 장축 경계 상자를 검출하고, 장축 경계 상자의 중심점의 월드 좌표 및 중심 너비 값을 획득하는 위치 검출부(150) 및 상기 영상 데이터, 레이블링 데이터, 장축 경계 상자의 중심점의 월드 좌표 및 중심 너비 값을 로봇 장치(200)로 전송하여 상기 로봇 장치(200)가 비정형 재활용품을 분류할 수 있도록 제어하는 제어부(170)를 포함하여 구성되는 것을 특징으로 한다.
상품 상세설명

상품문의
교환/반품



