

특허(기계금속)
상품 정보
상품 기본설명
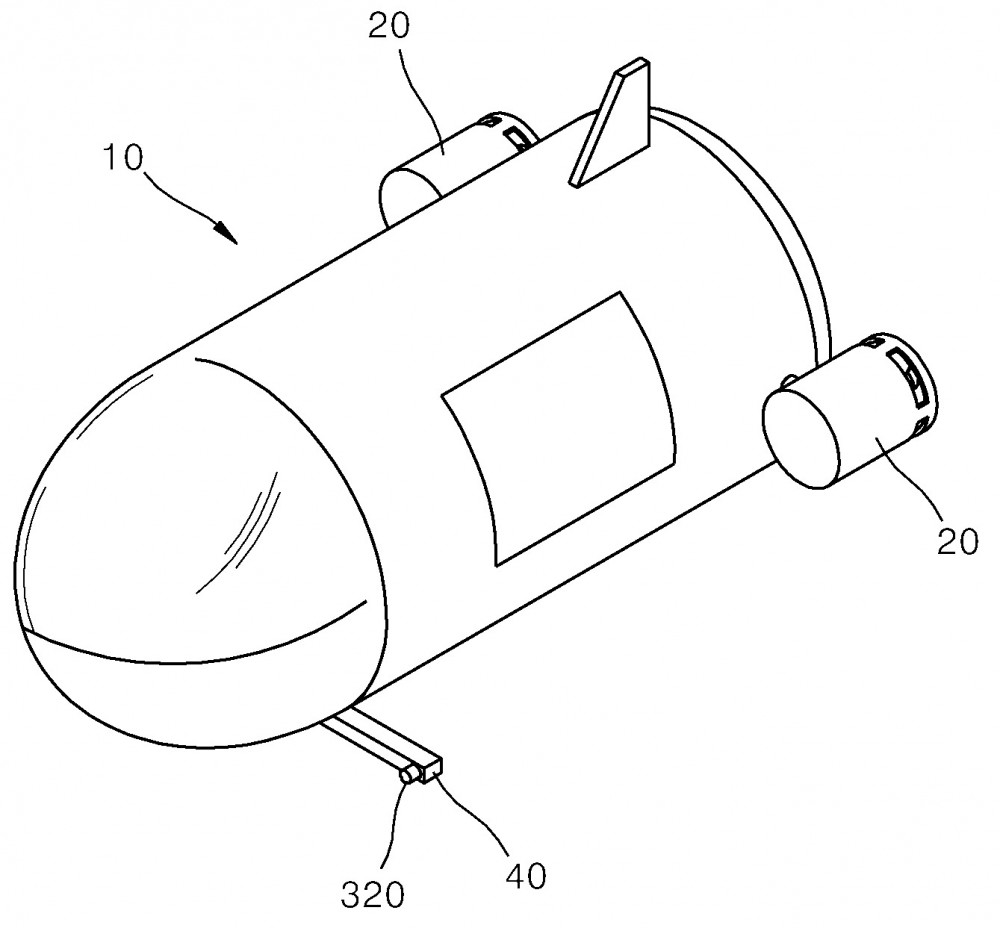
본 발명은 스테레오 포토센서를 구비한 다관절 초소형 수중로봇에 있어서, 내부에 소정의 저장공간을 형성하고, 외형을 형성하는 바디부와; 상기 바디부(10)의 일측에 구비되고, 추진력을 제공하는 한쌍의 동체 추진기와; 상기 바디부의 일측에 구비되고, 상기 바디부의 길이방향으로 이동이 가능하도록 구비되는 제1관절부(50)와; 상기 제1관절부(50)과 링크결합하고, 상기 제1관절부(50)에 대해서 양방향으로 각각 90°씩 회동이 가능한 제2관절부(40)와; 상기 제2관절부(40)의 일측에 구비되고, 제1카메라부(310)와 제2카메라부(320)로 구성되는 스테레오 카메라부와; 상기 제1관절부(50)에 대해서, 상기 제2관절부(40)의 바디부에 대해서 종방향 또는 회동운동 및 동체추진기를 제어하는 통합 제어부;를 포함하여 구비되는 스테레오 포토센서를 구비한 다관절 초소형 수중로봇의 구성을 제공한다.
상품 상세설명

상품문의
교환/반품





