

특허(바이오)
상품 정보
상품 기본설명
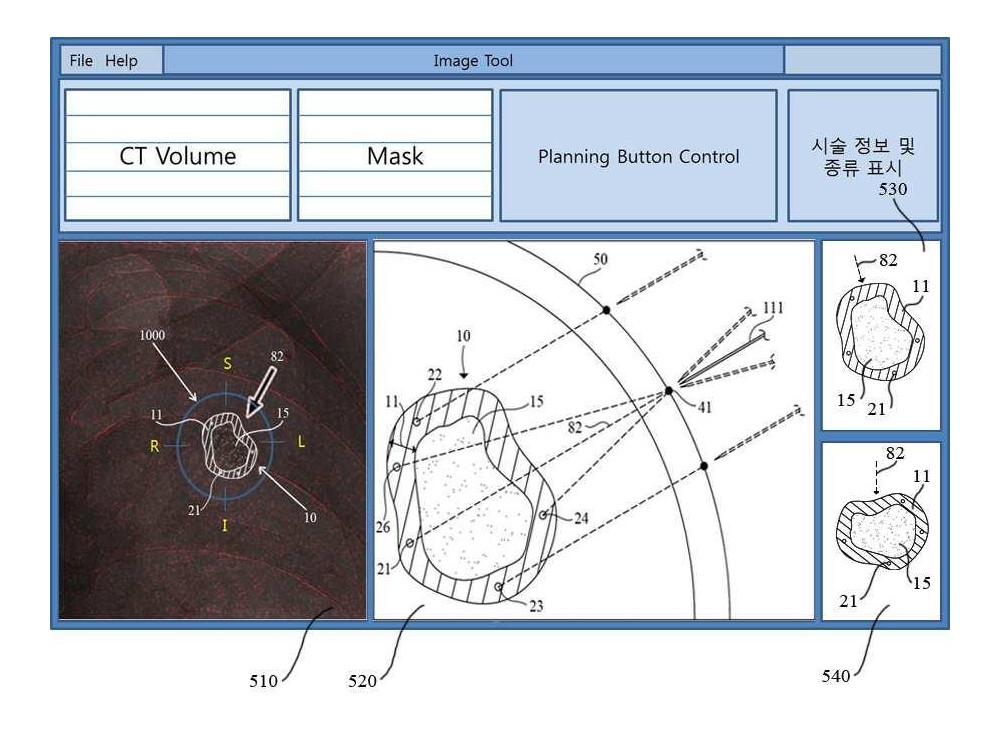
본 개시는 바늘 삽입형 중재시술 로봇 장치에 있어서, 수술장 영상에 수술 계획 정보를 통합하는 컴퓨터;로서, 이질성을 가지는 환부(heterogeneous surgical target)의 가장 자리(border) 상의 목표점(target point) 및 바늘형 의료 도구의 삽입 경로를 포함하는 수술 계획 정보를 수술장 영상에 통합하는 컴퓨터; 바늘형 의료 도구를 구비하는 로봇;으로서, 바늘형 의료 도구가 삽입 경로를 따르도록 컴퓨터의 지시에 따라 동작하는 로봇; 그리고 컴퓨터와 연동되어 수술 계획 정보가 통합된 수술장 영상을 사용하여 환부의 가장 자리를 보여주는 사용자 인터페이스(UI);로서, 수술 계획에 따라 로봇이 동작할 때 목표점에 대한 바늘형 의료 도구의 끝의 예상 도달 위치를 보여주는 사용자 인터페이스;를 포함하는 것을 특징으로 하는 바늘 삽입형 중재시술 로봇 장치에 관한 것이다.
상품 상세설명

상품문의
교환/반품





