

특허(전기전자)
상품 정보
상품 기본설명
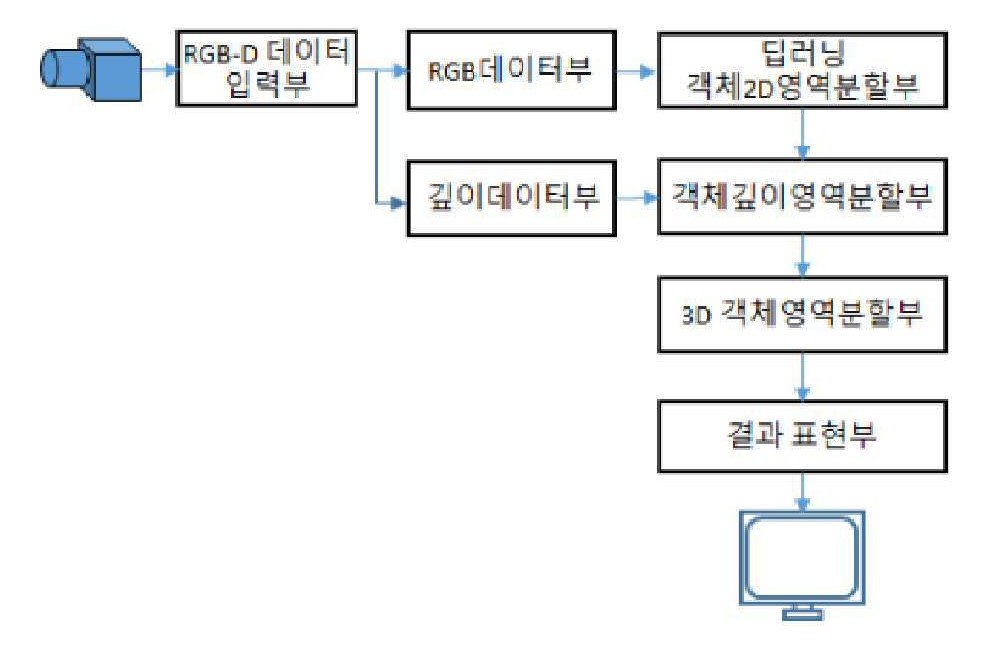
실시예는 RGB-D 데이터와 딥러닝을 이용한 3D객체영역분할 방법과 그 시스템에 관한 것이다. 구체적으로, 이러한 방법과 시스템은 RGB-D카메라와 최근의 딥러닝 기술을 활용해서 3차원으로 물체의 영역을 분할하여 객체의 xyz값과 RGB값을 찾아낼 수 있도록 한다. 구체적으로, 인식할 물체의 RGB영상과 깊이데이터 및 딥 러닝에 의해 객체의 3D객체영역분할을 수행함으로써, 객체의 xyz와 RGB컬러 정보를 획득할 수 있도록 하는 것을 특징으로 한다. 따라서, 이를 통해 실시예는 최종적으로 자동화 등의 로봇비전 감시를 할 경우에, 카메라를 이용하면서도 객체의 3D xyz 데이터(즉, 3차원적 정보)와 RGB 컬러 정보를 찾아서 표현함으로써, 3차원으로 물체를 인식하여 구분해낸다.
상품 상세설명

상품문의
교환/반품





